Hardware Configuration#
(To be completed)
This section describes the hardware configurations for PoV vehicles, including
- Sensors and Actuators: describes the sensors and actuators used in the reference design.
- ECUs: describes the ECUs used in the reference design.
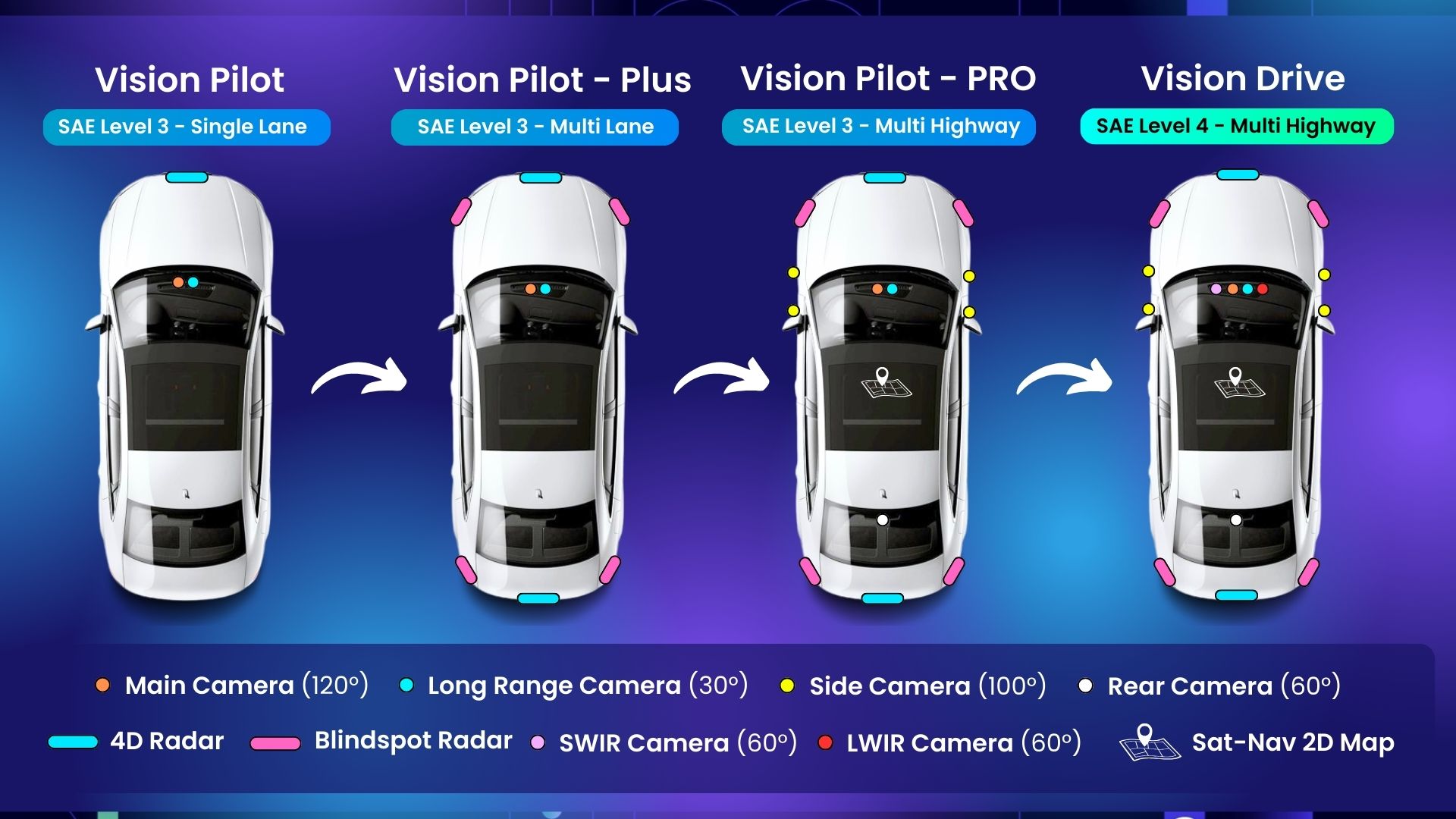
The sensors requirements are different based on different PoV version.
-
Vision Pilot:
- Two front-facing cameras:
- a main camera: 8MP RGB camera with 120 degree horizontal FoV
- a long-range camera: 8MP RGB camera with 30 degree horizontal FoV
- One front-facing 4D RADAR.
- Two front-facing cameras:
-
Vision Pilot Plus:
- Two front-facing cameras:
- a main camera: 8MP RGB camera with 120 degree horizontal FoV
- a long-range camera: 8MP RGB camera with 30 degree horizontal FoV
- Two 4D RADAR: front and rear
- Four blindspot Radar
- Two front-facing cameras:
-
Vision Pilot Pro:
- Two front-facing cameras:
- a main camera: 8MP RGB camera with 120 degree horizontal FoV
- a long-range camera: 8MP RGB camera with 30 degree horizontal FoV
- Two 4D RADAR: front and rear
- Four blindspot Radar
- Four side camera: 8MP RGB camera with 100 degree horizontal FoV
- Sat-Nav 2D map
- Two front-facing cameras:
-
Vision Drive:
- Two front-facing cameras:
- a main camera: 8MP RGB camera with 120 degree horizontal FoV
- a long-range camera: 8MP RGB camera with 30 degree horizontal FoV
- One LWIR Camera: 60 degree horizontal FoV
- One SWIR Camera: 60 degree horizontal FoV
- Two 4D RADAR: front and rear
- Four blindspot Radar
- Four side camera: 8MP RGB camera with 100 degree horizontal FoV
- Sat-Nav 2D map
- Two front-facing cameras:
The locations of the sensors are shown in the figure below.