Quick Start Demo#
Below you can find instructions on how to setup the self-driving demo of AWSIM simulation controlled by Autoware. The instruction assumes using the Ubuntu OS.
Demo configuration#
The simulation provided in the AWSIM Labs demo is configured as follows:
| AWSIM Demo Settings | |
|---|---|
| Vehicle | Lexus RX 450h |
| Environment | Japan Tokyo Nishishinjuku |
| Sensors | GNSS IMU 3 x VLP16 Traffic Light Camera |
| Traffic | Randomized traffic |
| ROS2 | humble |
PC specs#
Please make sure that your machine meets the following requirements in order to run the simulation correctly:
| Required PC Specs | |
|---|---|
| OS | Ubuntu 22.04 |
| CPU | 6c12t or higher |
| GPU | RTX 2080 or higher |
| Nvidia Driver (Ubuntu 22) | 545 |
DDS configuration#
In order to run AWSIM Labs with the best performance and without hogging the network, please follow the steps below.
Add the following lines to ~/.bashrc file:
if [ ! -e /tmp/cycloneDDS_configured ]; then
sudo sysctl -w net.core.rmem_max=2147483647
sudo sysctl -w net.ipv4.ipfrag_time=3
sudo sysctl -w net.ipv4.ipfrag_high_thresh=134217728 # (128 MB)
sudo ip link set lo multicast on
touch /tmp/cycloneDDS_configured
fi
Every time you restart this machine, and open a new terminal, the above commands will be executed.
Until you restart the machine, they will not be executed again.
CycloneDDS configuration#
Save the following as cyclonedds.xml in your home directory ~:
<?xml version="1.0" encoding="UTF-8" ?>
<CycloneDDS xmlns="https://cdds.io/config" xmlns:xsi="http://www.w3.org/2001/XMLSchema-instance" xsi:schemaLocation="https://cdds.io/config https://raw.githubusercontent.com/eclipse-cyclonedds/cyclonedds/master/etc/cyclonedds.xsd">
<Domain Id="any">
<General>
<Interfaces>
<NetworkInterface name="lo" priority="default" multicast="default" />
</Interfaces>
<AllowMulticast>default</AllowMulticast>
<MaxMessageSize>65500B</MaxMessageSize>
</General>
<Internal>
<SocketReceiveBufferSize min="10MB"/>
<Watermarks>
<WhcHigh>500kB</WhcHigh>
</Watermarks>
</Internal>
</Domain>
</CycloneDDS>
Make sure the following lines are added to the ~/.bashrc file:
export RMW_IMPLEMENTATION=rmw_cyclonedds_cpp
export CYCLONEDDS_URI=/home/your_username/cyclonedds.xml
Replace your_username with your actual username.
Note
You should use the absolute path to the cyclonedds.xml file.
Warning
A system restart is required for these changes to work.
Warning
DO NOT set export ROS_LOCALHOST_ONLY=1. CycloneDDS configuration will be enough.
Start the demo#
Running the AWSIM demo#
To run the simulator, please follow the steps below.
-
Install Nvidia GPU driver (Skip if already installed).
- Add Nvidia driver to apt repository
sudo add-apt-repository ppa:graphics-drivers/ppa sudo apt update - Install the recommended version of the driver.
sudo ubuntu-drivers autoinstall # or install a specific version (following was tested) sudo apt install nvidia-driver-545 - Reboot your machine to make the installed driver detected by the system.
sudo reboot - Open terminal and check if
nvidia-smicommand is available and outputs summary similar to the one presented below.$ nvidia-smi +---------------------------------------------------------------------------------------+ | NVIDIA-SMI 545.23.08 Driver Version: 545.23.08 CUDA Version: 12.3 | |-----------------------------------------+----------------------+----------------------+ | GPU Name Persistence-M | Bus-Id Disp.A | Volatile Uncorr. ECC | | Fan Temp Perf Pwr:Usage/Cap | Memory-Usage | GPU-Util Compute M. | | | | MIG M. | |=========================================+======================+======================| | 0 NVIDIA GeForce RTX 4080 On | 00000000:08:00.0 On | N/A | | 0% 36C P8 12W / 320W | 5456MiB / 16376MiB | 2% Default | | | | N/A | +-----------------------------------------+----------------------+----------------------+ ...
- Add Nvidia driver to apt repository
-
Install Vulkan Graphics Library (Skip if already installed).
- Update the environment.
sudo apt update - Install the library.
sudo apt install libvulkan1
- Update the environment.
-
Download and Run AWSIM Demo binary.
-
Download the latest release from:
-
Unzip the downloaded file.
-
Make the file executable.
Right click the
awsim_labs.x86_64file and check theExecutecheckbox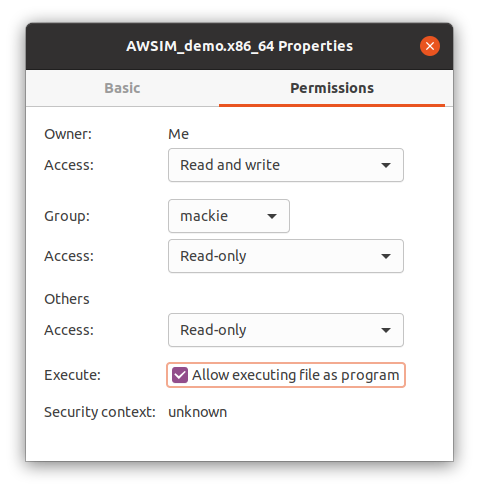
or execute the command below.
chmod +x <path to AWSIM folder>/awsim_labs.x86_64 -
Launch
awsim_labs.x86_64../<path to AWSIM folder>/awsim_labs.x86_64It may take some time for the application to start the so please wait until image similar to the one presented below is visible in your application window.

-
Launching Autoware#
In order to configure and run the Autoware software with the AWSIM demo, please:
-
Download
map files (pcd, osm)and unzip them. Download Map files (pcd, osm) -
Clone Autoware and move to the directory.
git clone https://github.com/autowarefoundation/autoware.git cd autoware - Switch branch to
main.git checkout main - Configure the environment. (Skip if Autoware environment has been configured before)
./setup-dev-env.sh - Create the
srcdirectory and clone external dependent repositories into it.mkdir src vcs import src < autoware.repos - Install dependent ROS packages.
source /opt/ros/humble/setup.bash rosdep update rosdep install -y --from-paths src --ignore-src --rosdistro $ROS_DISTRO -
Build the workspace.
colcon build --symlink-install --cmake-args -DCMAKE_BUILD_TYPE=RelWithDebInfo -DCMAKE_EXPORT_COMPILE_COMMANDS=1 -
Launch Autoware.
source install/setup.bash ros2 launch autoware_launch e2e_simulator.launch.xml vehicle_model:=awsim_labs_vehicle sensor_model:=awsim_labs_sensor_kit map_path:=<absolute path of map folder> launch_vehicle_interface:=true # Use the absolute path for the map folder, don't use the ~ operator. # Example: ros2 launch autoware_launch e2e_simulator.launch.xml vehicle_model:=awsim_labs_vehicle sensor_model:=awsim_labs_sensor_kit map_path:=/home/your_username/autoware_map/nishishinjuku_autoware_map launch_vehicle_interface:=true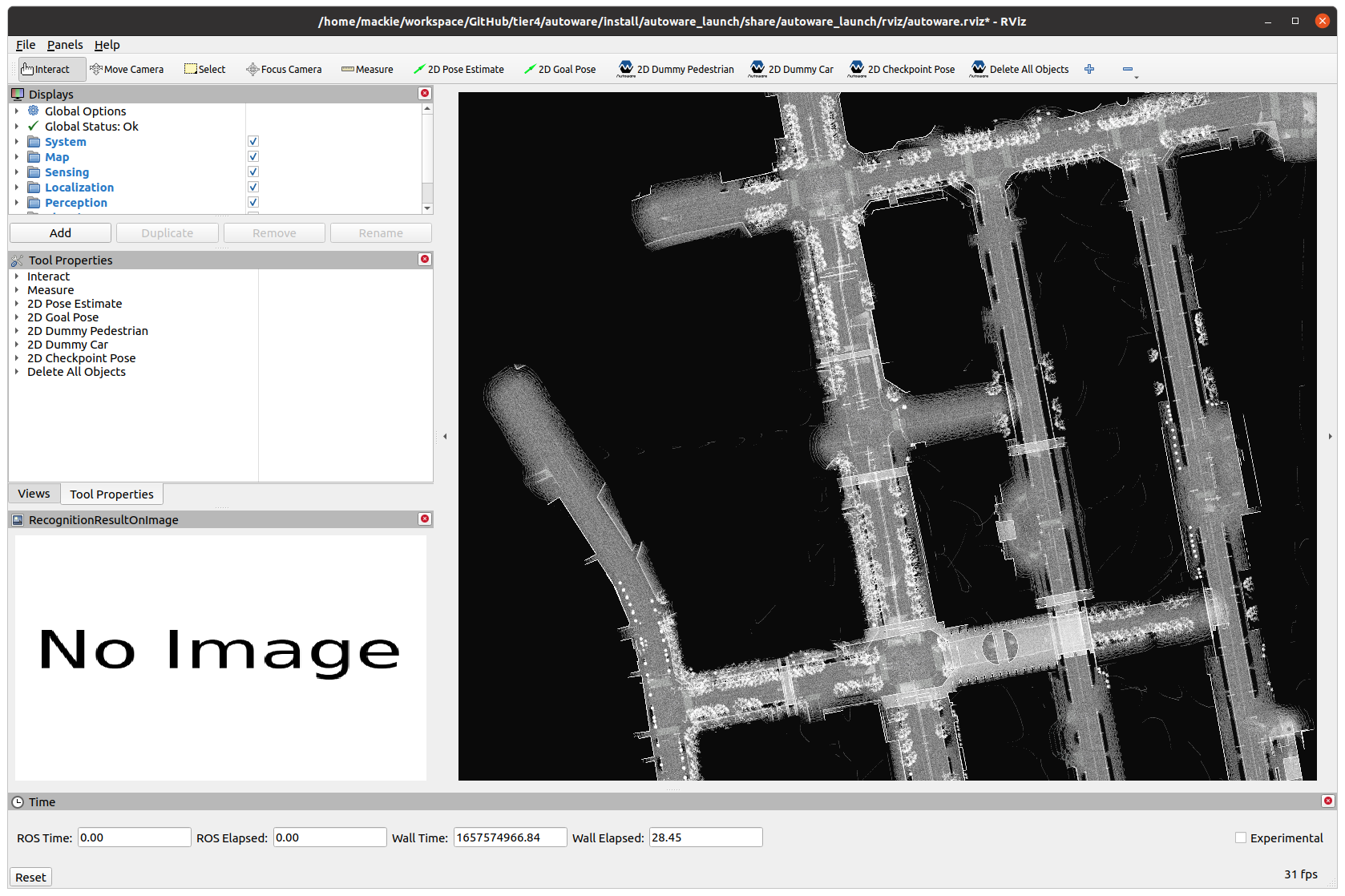
Let's run the self driving simulation#
-
Launch AWSIM and Autoware according to the steps described earlier in this document.

-
The Autoware will automatically set its pose estimation as presented below.
-
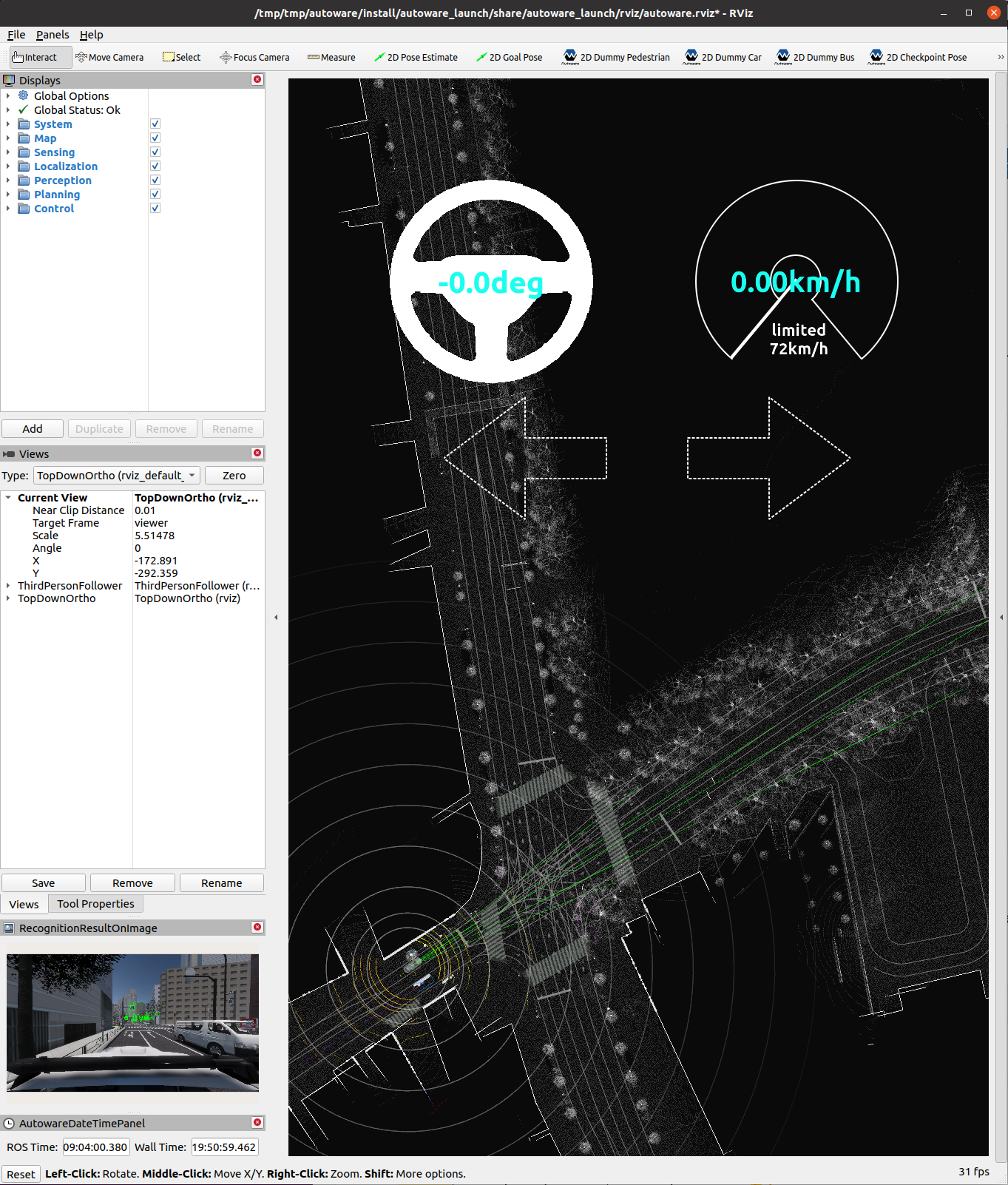
Set the navigation goal for the vehicle.
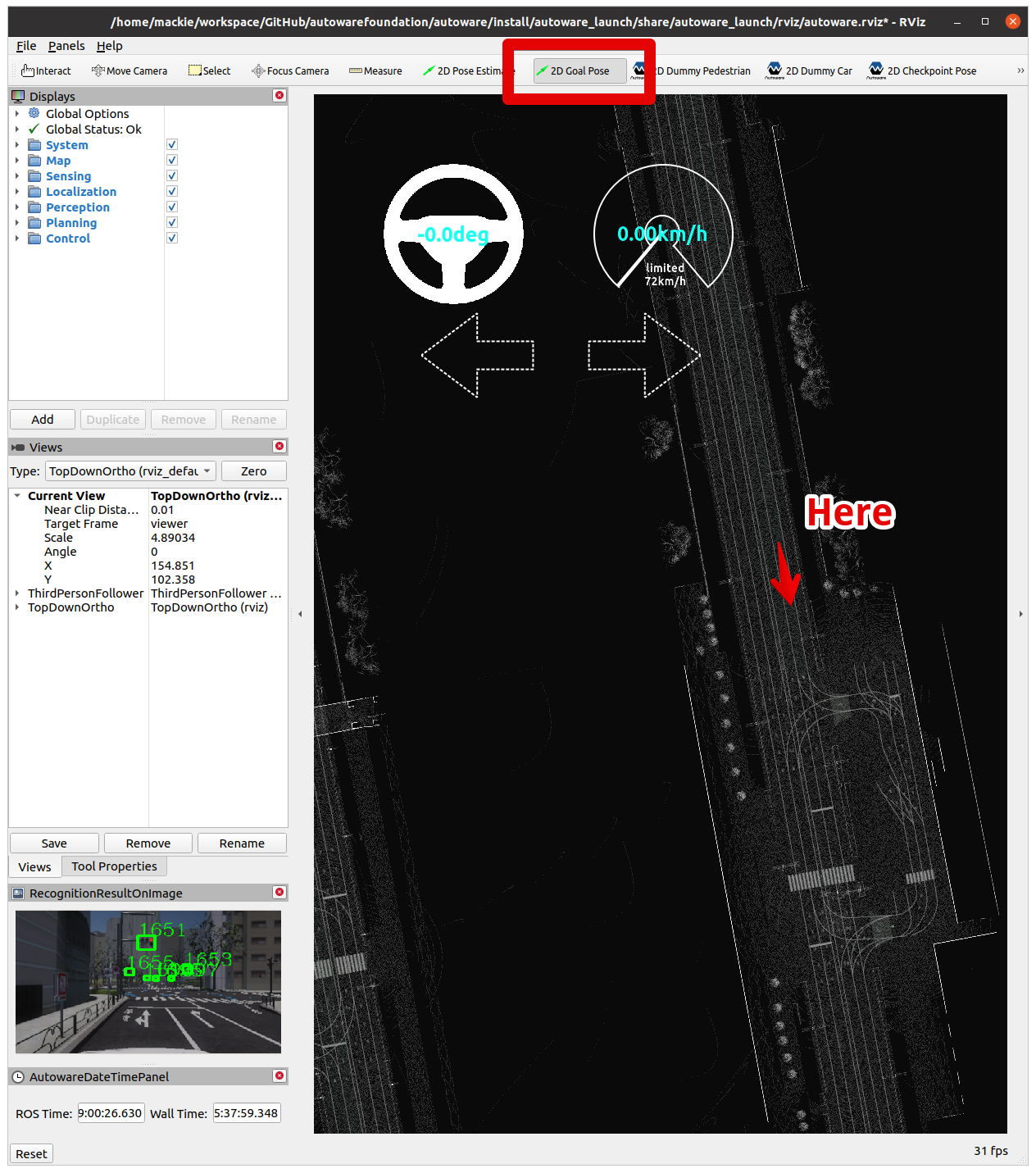
-
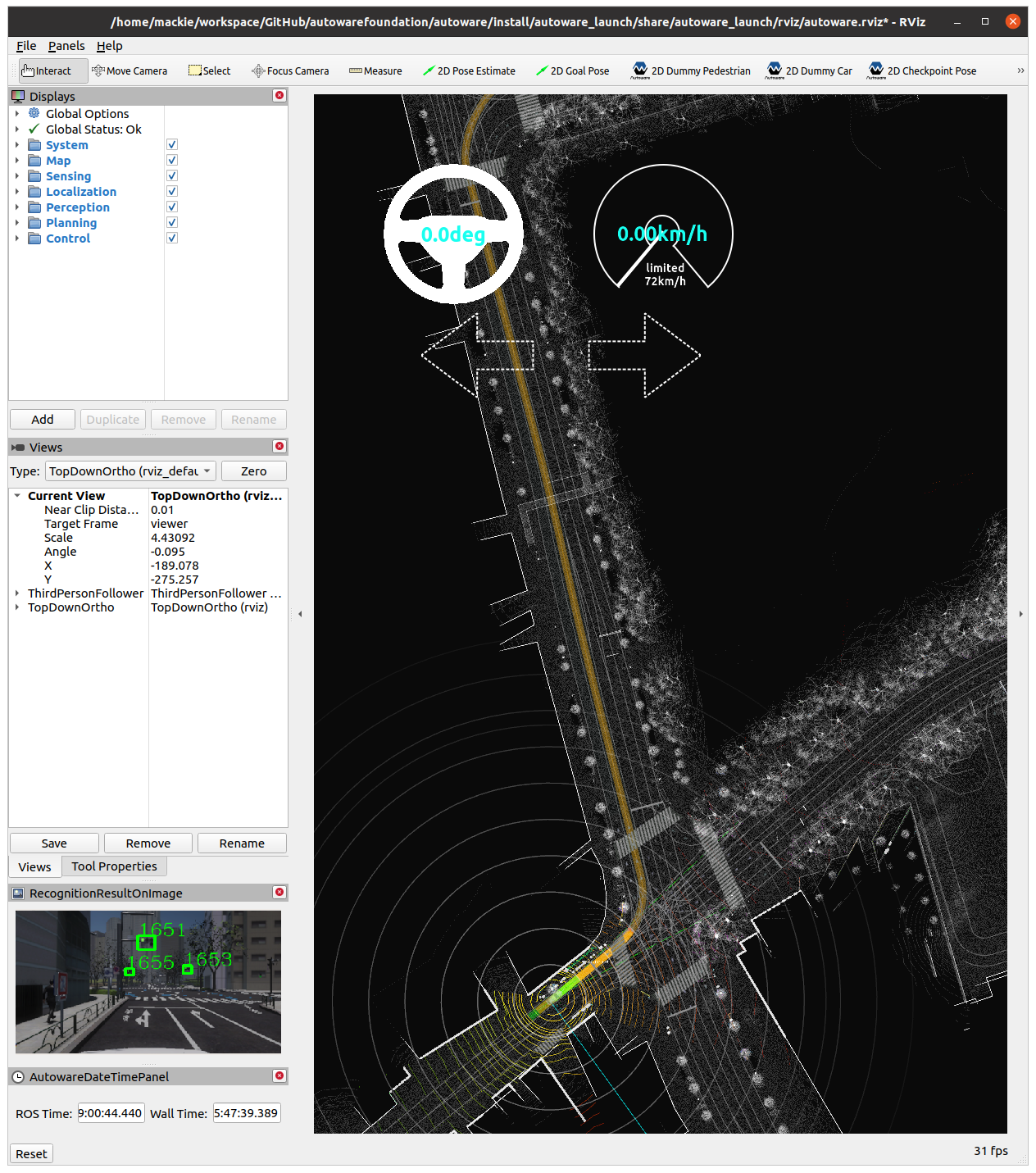
Optionally, you can define an intermediate point through which the vehicle will travel on its way to the destination.
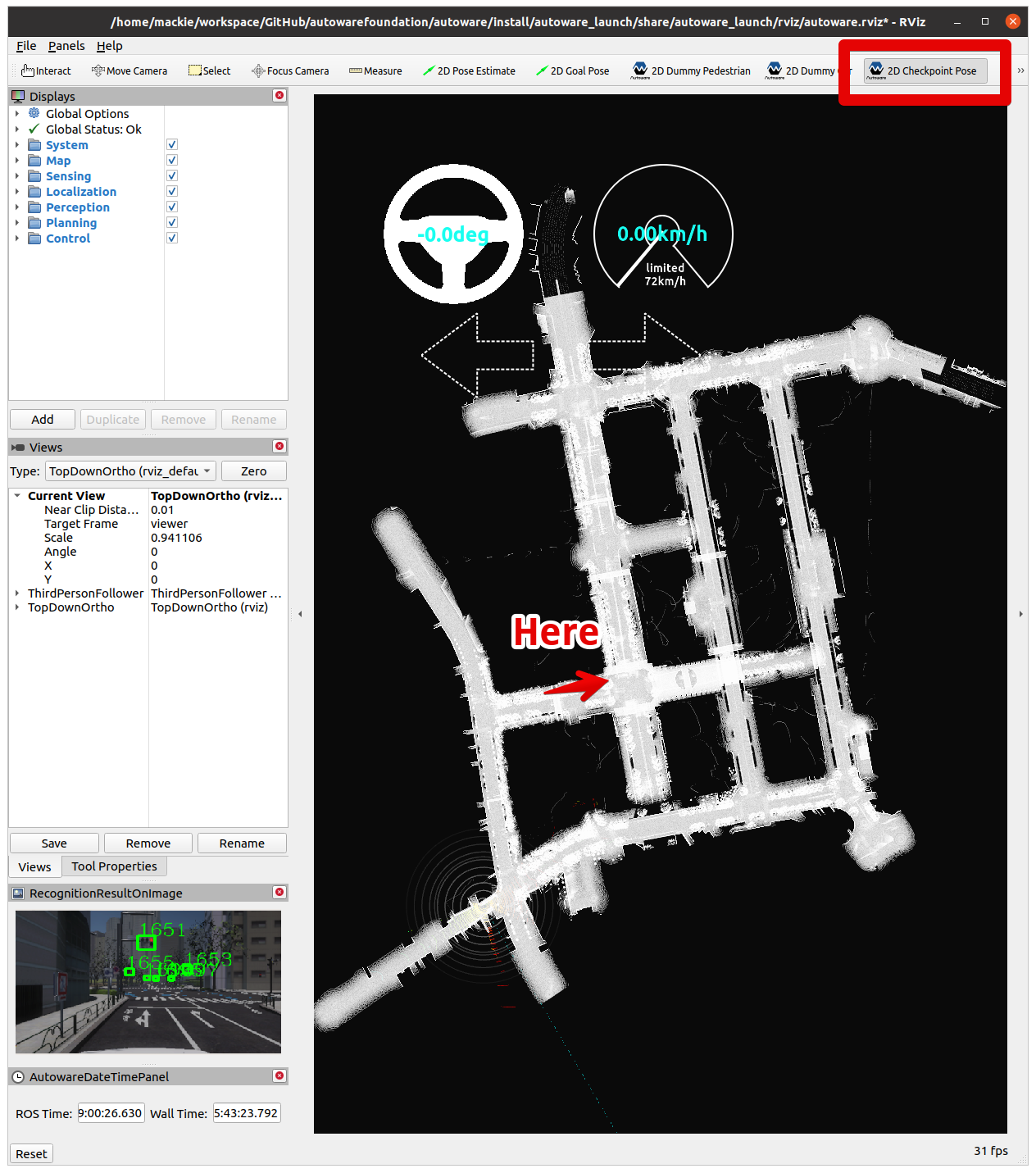 The generated path can be seen on the image below.
The generated path can be seen on the image below.
-
Enable self-driving.
To make the vehicle start navigating please engage its operation using the command below.
cd autoware
source install/setup.bash
ros2 topic pub /autoware/engage autoware_vehicle_msgs/msg/Engage '{engage: True}' -1

The self-driving simulation demo has been successfully launched!
Troubleshooting#
In case of any problems with running the sample AWSIM binary with Autoware, start with checking our Troubleshooting page with the most common problems.