TimeDelayEstimation#
This delay estimation node estimates a time delay from inputs to outputs for accel, brake, and steer.
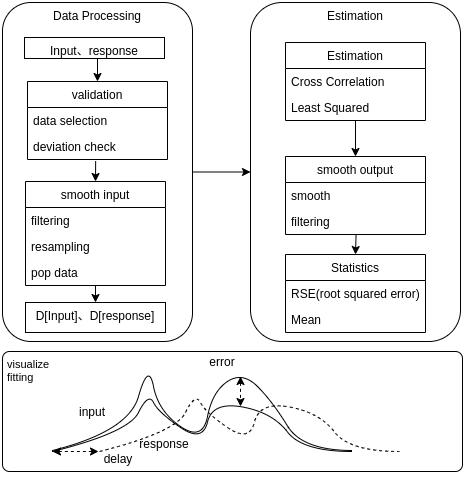
Input / Response#
The following topics are used to estimate the delay.
/vehicle/raw_vehicle_cmd: used as accel/brake target value/control/control_cmd: used as steer target value/calibration/vehicle/accel_status: used as accel observed value/calibration/vehicle/brake_status: used as brake observed value/vehicle/status/steering: used as steer observed value/calibration/vehicle/is_engage: used to check the driving operation status
output.
For users, the TimeDelay.msg output contains the following items:
- time_delay: Estimated time delay.
- mean: Mean value of the estimated time delay
- stddev: Standard deviation of the estimated time delay
- is_valid_data: Validity determination of the current data
- first_order_model_coefficients:size 2 array of model coefficients(b,k,t)
- second_order_model_coefficients:size 2 array of model coefficients(m,b,k,t)
In addition, the following items are output for developers.
- Mean average error of delay estimation
- Standard deviation of the mean error of delay estimation
These values can be confirmed in rqt_multiplot, described below.
How to Run Time Delay Estimator#
Note: You need to build the Autoware beforehand.
The following command will start the delay estimation node.
bash
ros2 launch time_delay_estimator time_delay_estimator.launch.xml is_showing_debug_graph:=true
Change the estimator type#
You can decide the estimator_type with the following parameters
- "cc" : Cross Correlation
- "ls" : Least Squared
- "ls2" : Least Squared Second
Note: Only "cc" Cross Correlation will display the debug graph
How to check the estimated delay#
The necessary information is plotted in the rqt_multiplot, which displays the following information from top to bottom.
- First row: Input data processing results examination
- Second row: Estimation results confirmation
- Third row: The confidence level of the estimation results
- Fourth row: Input/output error after delay compensation
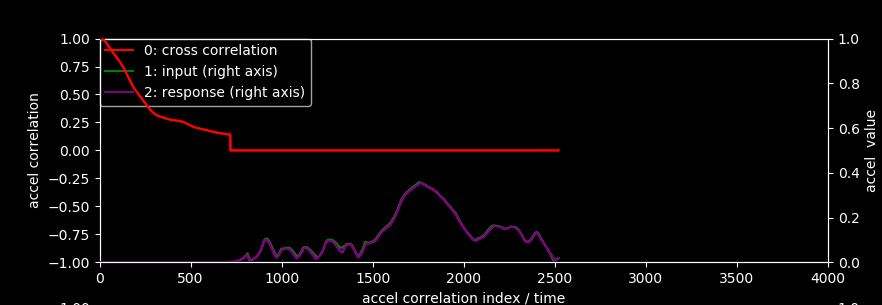
Input data processing results examination#
Check the input and output data. It is also used to adjust parameters of the estimation logic.
- input raw : input data
- response raw : response data
- input processed : input data after compensation (*)
- response processed : response data after compensation (*)
- data stddev : standard deviation of the data used for estimation (used to determine validity)
- is valid data : Whether the data is valid or not
- 0.0 : invalid because the standard deviation is less than the threshold (
*_min_stddev_threshold). - 1.0 : valid because the standard deviation is greater than the threshold (
*_min_stddev_threshold).
- 0.0 : invalid because the standard deviation is less than the threshold (
(*) Smoothing, normalization, and resampling are applied as preprocessing.
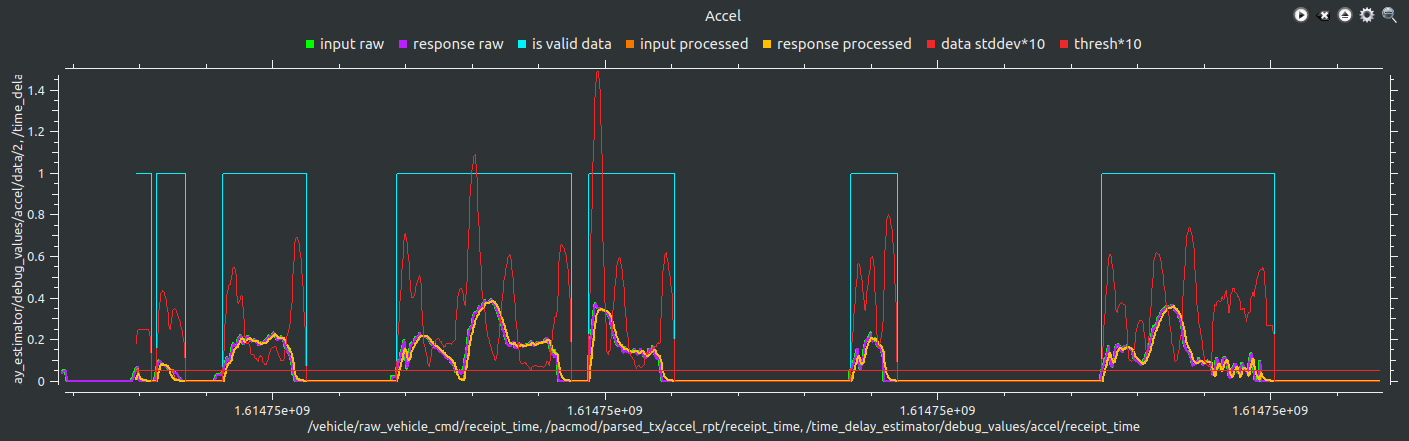
You need to adjust the value of *_min_stddev_threshold according to the standard deviation to determine the validity of the data.
Estimation results confirmation#
Check the estimation results.
- delay : Time delay estimated at each step
- average : Average of the time delays
- stddev : Standard deviation of the estimated delay
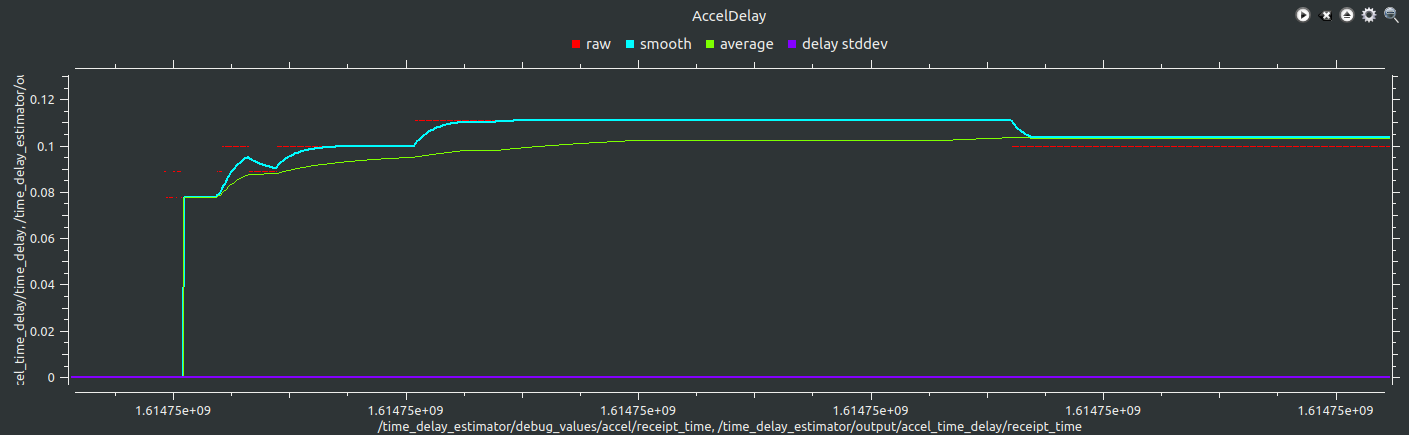
It is preferable to use the average for the calibration results.
The delay estimation starts when enough data is stored. The output value is zero until it is ready.
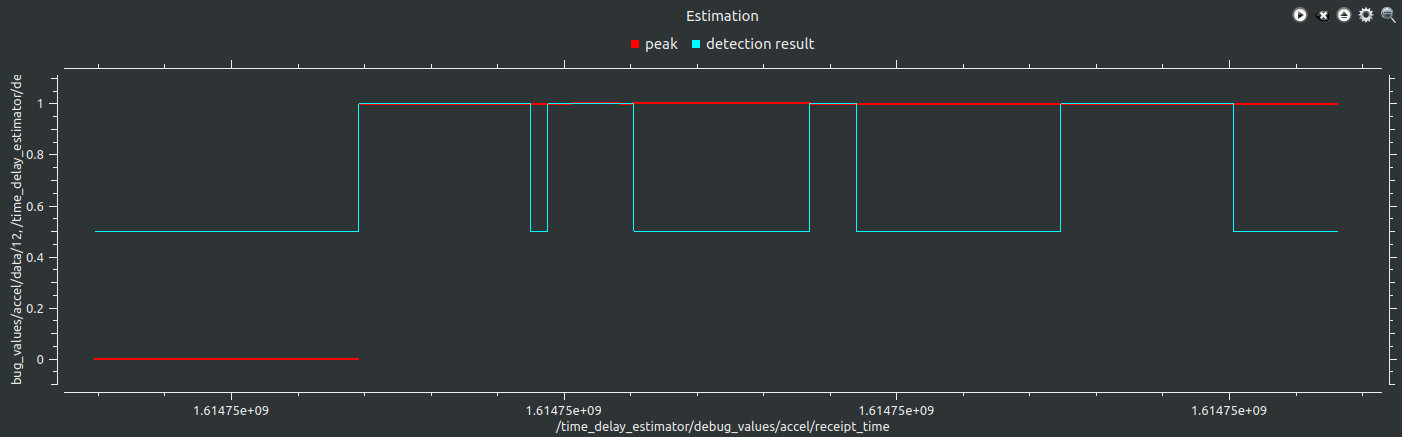
Confidence level of the estimation results#
The reliability of the estimated time delay can be analyzed by the correlation coefficient.
- correlation peak : correlation coefficient between input and output (if this value is low (about 0.7 or less), the estimation may not be successful)
- detection result : Whether the cross-correlation resulted in a good estimation or not.
- 0.00 : Invalid estimation due to low correlation (output the previous value)
- 0.50 : Estimation has not started yet or received invalid data
- 1.00 : Estimation has been done properly
Input/output error after delay compensation#
Check the statistics of the errors in the input/output data after the time delay compensation.
- mae raw : Mean absolute error of input/output after the delay compensation
- mae mean : Mean of the mean absolute error calculated in each estimation step
- mae stddev : Standard deviation of mean absolute error
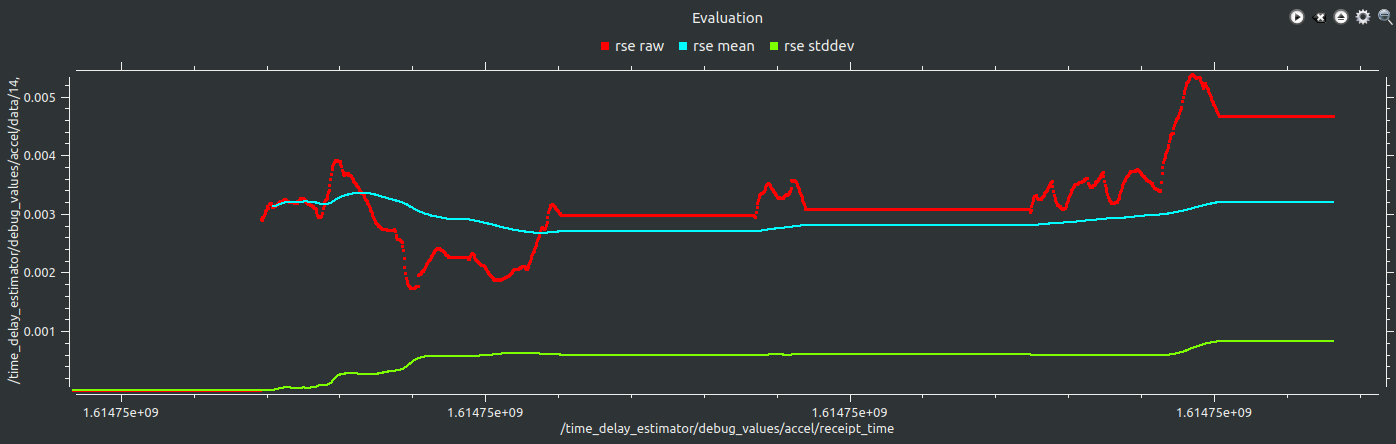
If these values are large, the input/output model needs to be reconsidered.
Data preprocessing#
Examine the results of processing the input data#
Data that do not satisfy the following conditions are considered invalid and will not be used for estimation.
- Data variation (evaluated by standard deviation) is smaller than the threshold
- The car is not in automatic operation mode (judged from Autoware's Engage, Vehicle's Engage, etc.)
Visualization of delay estimation results#
Before running the node, you need to set the is_showing_debug_info parameter in the yaml file to true for a visualization.
Then the internal values of accel/brake/steer/test are plotted on the python visualization tool.
If the superposition of input and response is good, we can say that we have a good estimation.
Test WIP#
Execute the following command to perform an estimation on the sample data. This test should be used to see the characteristics when the parameters are changed.
sh
roslaunch time_delay_estimator test_time_delay_estimator.launch