FAST_LIO_LC#
What is FAST_LIO_LC?#
- A computationally efficient and robust LiDAR-inertial odometry package with loop closure module and graph optimization.
Repository Information#
Original Repository link#
https://github.com/yanliang-wang/FAST_LIO_LC
Required Sensors#
- LIDAR [Velodyne, Ouster, Livox]
- IMU [6-AXIS, 9-AXIS]
- GPS [Optional]
ROS Compatibility#
- ROS 1
Dependencies#
- Ubunutu 18.04
- ROS Melodic
- PCL >= 1.8, Follow PCL Installation.
- Eigen >= 3.3.4, Follow Eigen Installation.
- GTSAM >= 4.0.0, Follow GTSAM Installation.
wget -O ~/Downloads/gtsam.zip https://github.com/borglab/gtsam/archive/4.0.0-alpha2.zip
cd ~/Downloads/ && unzip gtsam.zip -d ~/Downloads/
cd ~/Downloads/gtsam-4.0.0-alpha2/
mkdir build && cd build
cmake ..
sudo make install
Build & Run#
1) Build#
mkdir -p ~/ws_fastlio_lc/src
cd ~/ws_fastlio_lc/src
git clone https://github.com/gisbi-kim/FAST_LIO_SLAM.git
git clone https://github.com/Livox-SDK/livox_ros_driver
cd ..
catkin_make
2) Set parameters#
- After downloading the repository, change topic and sensor settings on the config file (
workspace/src/FAST_LIO_LC/FAST_LIO/config/ouster64_mulran.yaml) with the lidar topic name in your bag file.
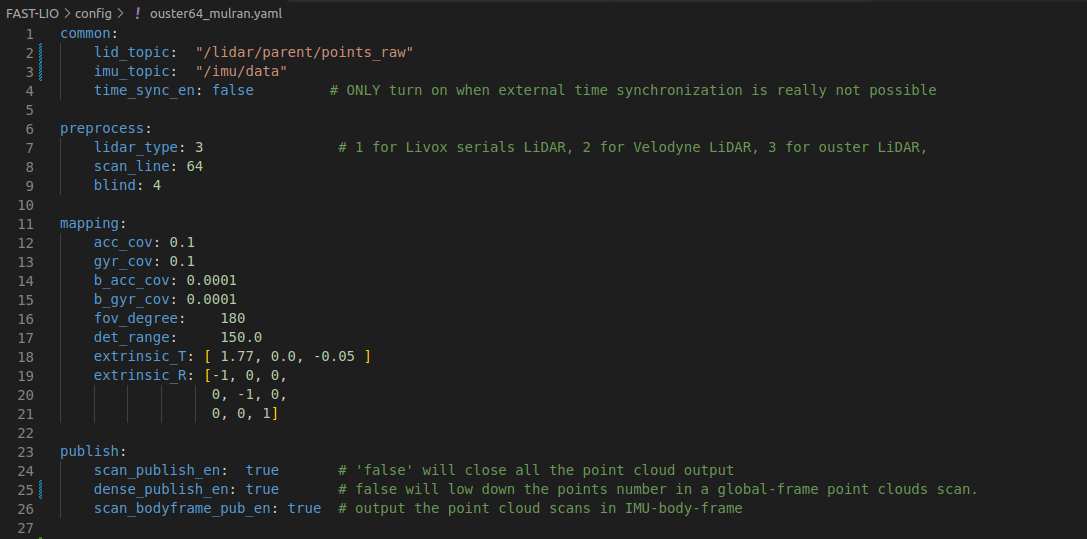
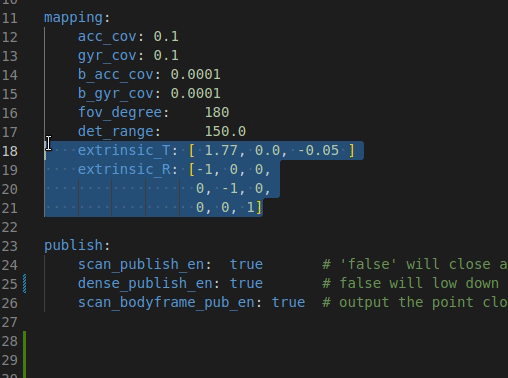
- For imu-lidar compatibility, extrinsic matrices from calibration must be changed.
- To enable auto-save,
pcd_save_enablemust be1from the launch file (workspace/src/FAST_LIO_LC/FAST_LIO/launch/mapping_ouster64_mulran.launch).
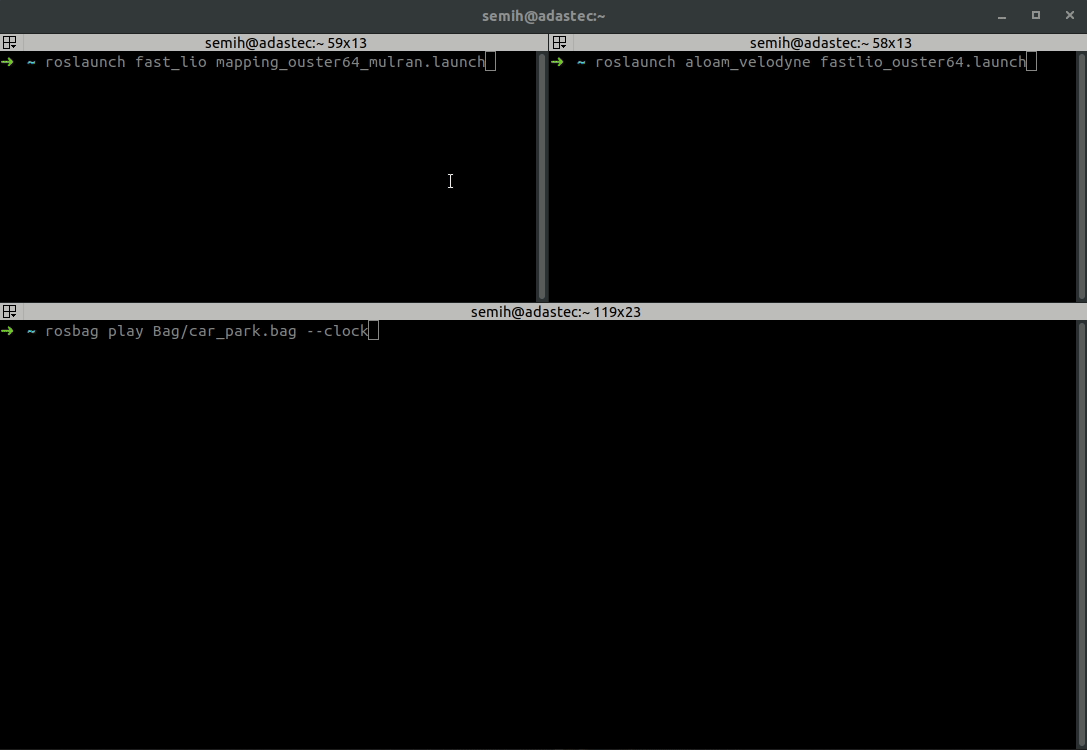
3) Run#
- For Ouster OS1-64
# open new terminal: run FAST-LIO roslaunch fast_lio mapping_ouster64.launch # open the other terminal tab: run SC-PGO roslaunch aloam_velodyne fastlio_ouster64.launch # play bag file in the other terminal rosbag play RECORDED_BAG.bag --clock
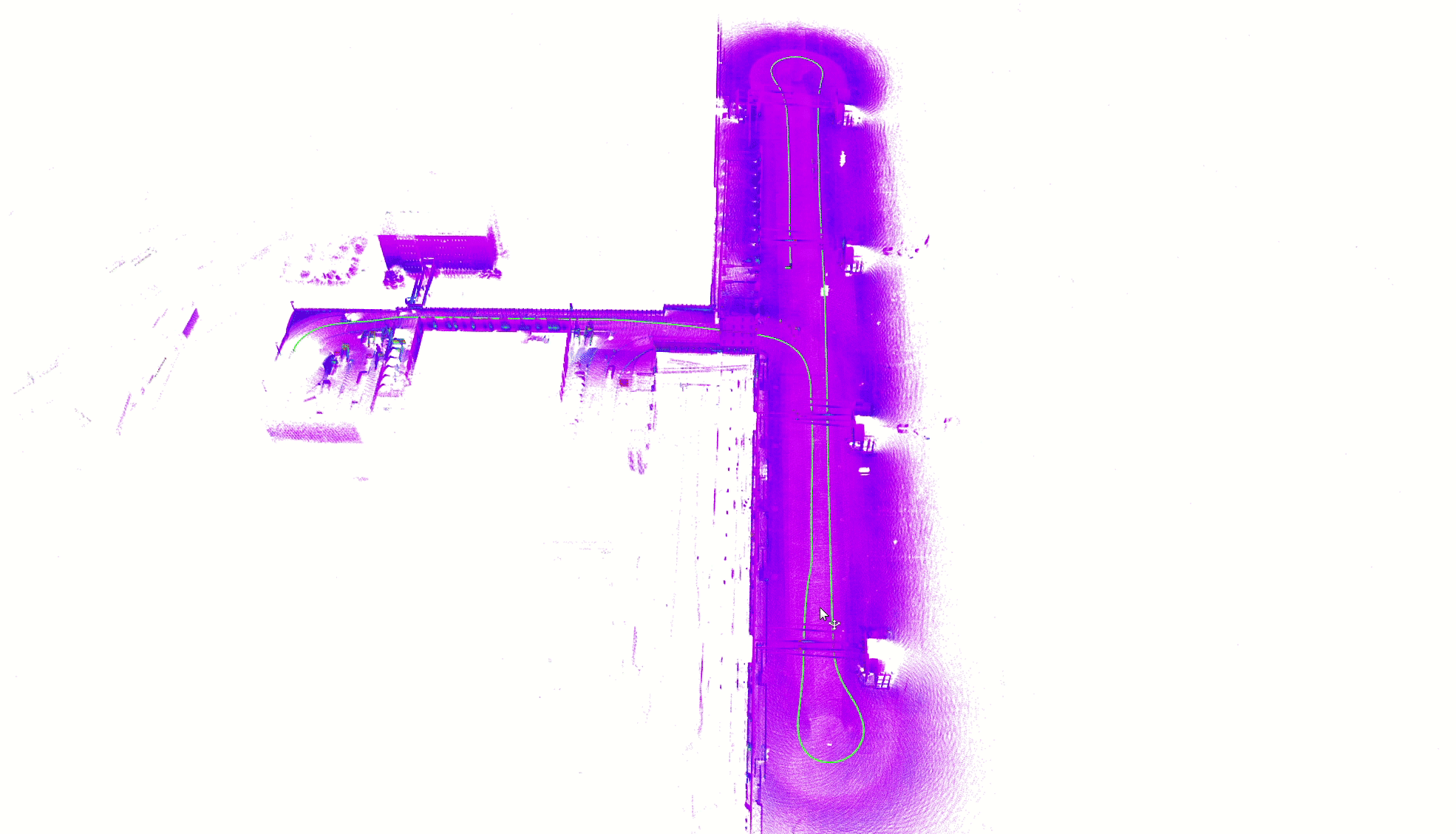
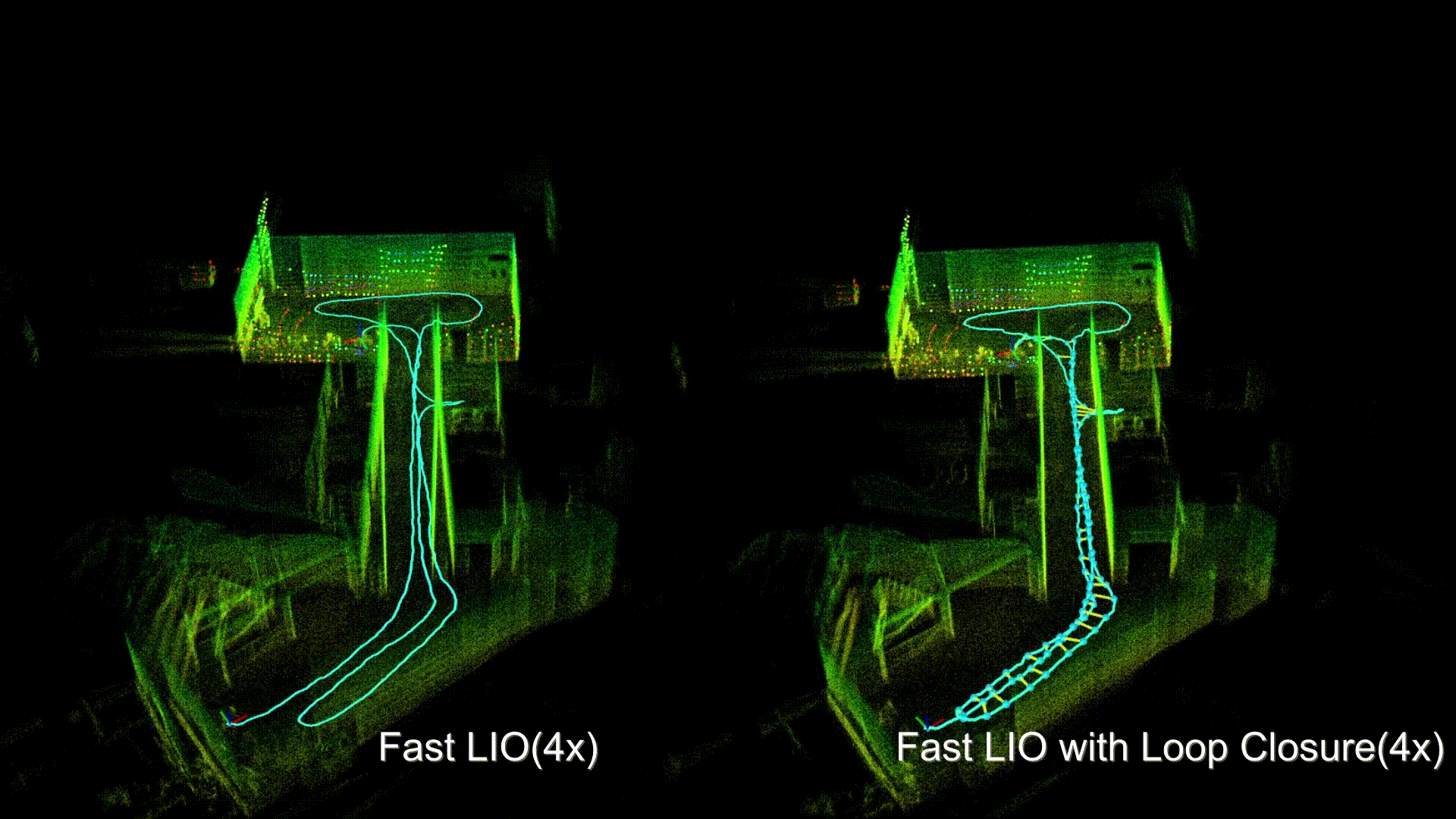
Example Result#

Other Examples#
Example dataset#
Check original repository link for example dataset.
Contact#
- Maintainer: Yanliang Wang (
wyl410922@qq.com)
Acknowledgements#
- Thanks for FAST_LIO authors.