FAST_LIO_SLAM#
What is FAST_LIO_SLAM?#
- FAST_LIO_SLAM is the integration of FAST_LIO and SC-PGO which is scan context based loop detection and GTSAM based pose-graph optimization.
Repository Information#
Original Repository link#
https://github.com/gisbi-kim/FAST_LIO_SLAM
Required Sensors#
- LIDAR [Livox, Velodyne, Ouster]
- IMU [6-AXIS, 9-AXIS]
- GPS [OPTIONAL]
ROS Compatibility#
- ROS 1
Dependencies#
- ROS
- PCL
- Gtsam
wget -O ~/Downloads/gtsam.zip https://github.com/borglab/gtsam/archive/4.0.0-alpha2.zip
cd ~/Downloads/ && unzip gtsam.zip -d ~/Downloads/
cd ~/Downloads/gtsam-4.0.0-alpha2/
mkdir build && cd build
cmake ..
sudo make install
- PCL >= 1.8, Follow PCL Installation.
- Eigen >= 3.3.4, Follow Eigen Installation.
Build & Run#
1) Build#
mkdir -p ~/catkin_fastlio_slam/src
cd ~/catkin_fastlio_slam/src
git clone https://github.com/gisbi-kim/FAST_LIO_SLAM.git
git clone https://github.com/Livox-SDK/livox_ros_driver
cd ..
catkin_make
source devel/setup.bash
2) Set parameters#
- Set imu and lidar topic on
Fast_LIO/config/ouster64.yaml
3) Run#
# terminal 1: run FAST-LIO2
roslaunch fast_lio mapping_ouster64.launch
# open the other terminal tab: run SC-PGO
cd ~/catkin_fastlio_slam
source devel/setup.bash
roslaunch aloam_velodyne fastlio_ouster64.launch
# play bag file in the other terminal
rosbag play xxx.bag -- clock --pause
Example Result#
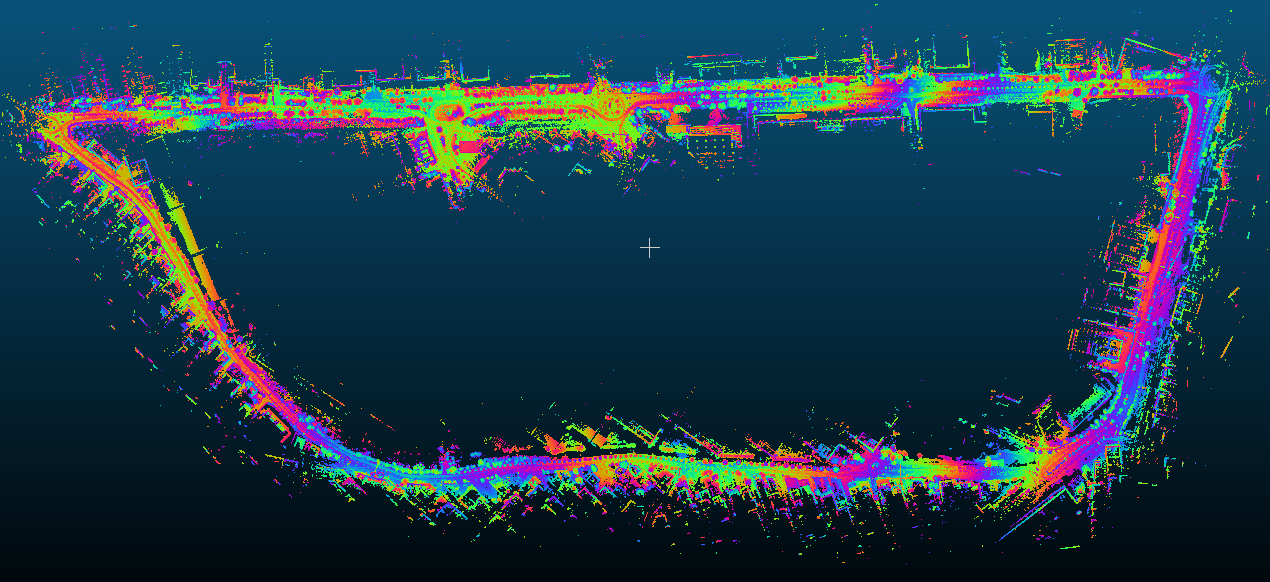
Other Examples#
-
Tutorial video 1 (using KAIST 03 sequence of MulRan dataset)
- Example result captures
- download the KAIST03 pcd map made by FAST-LIO-SLAM, 500MB
- Example result captures
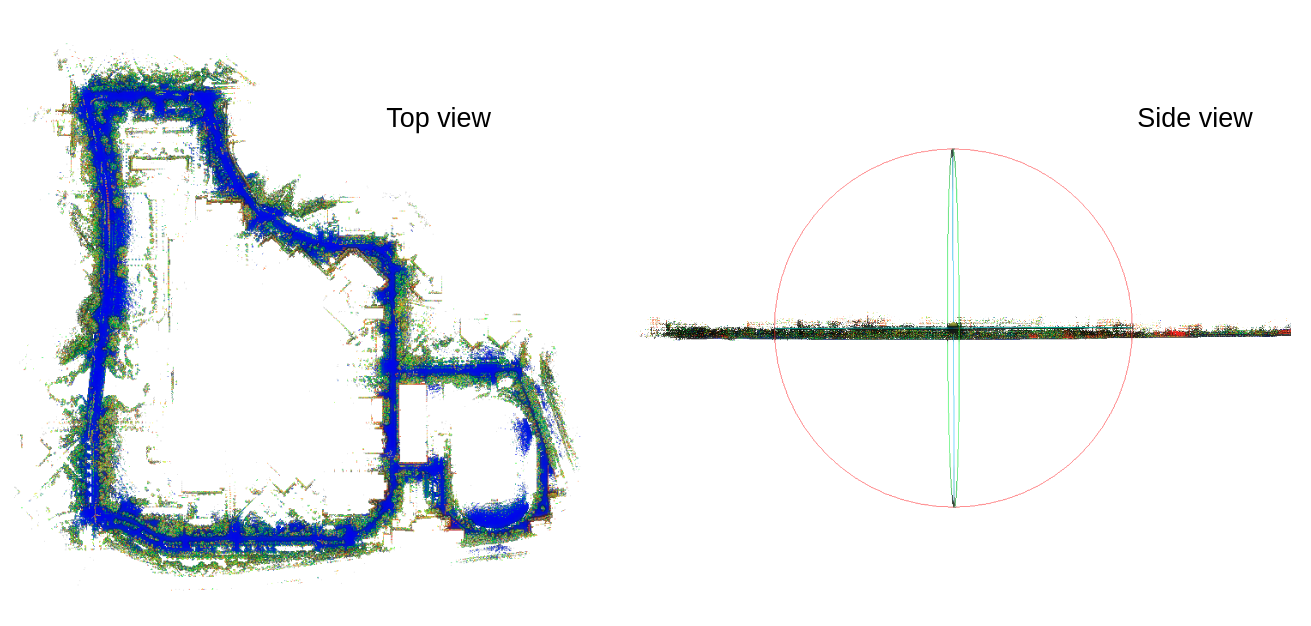
- Example Video 2 (Riverside 02 sequence of MulRan dataset)
- Example result captures

- download the Riverisde02 pcd map made by FAST-LIO-SLAM, 400MB
- Example result captures
Acknowledgements#
- Thanks for FAST_LIO authors.
- You may have an interest in this version of FAST-LIO + Loop closure, implemented by yanliang-wang
- Maintainer: Giseop Kim (
paulgkim@kaist.ac.kr)