LIO_SAM#
What is LIO_SAM?#
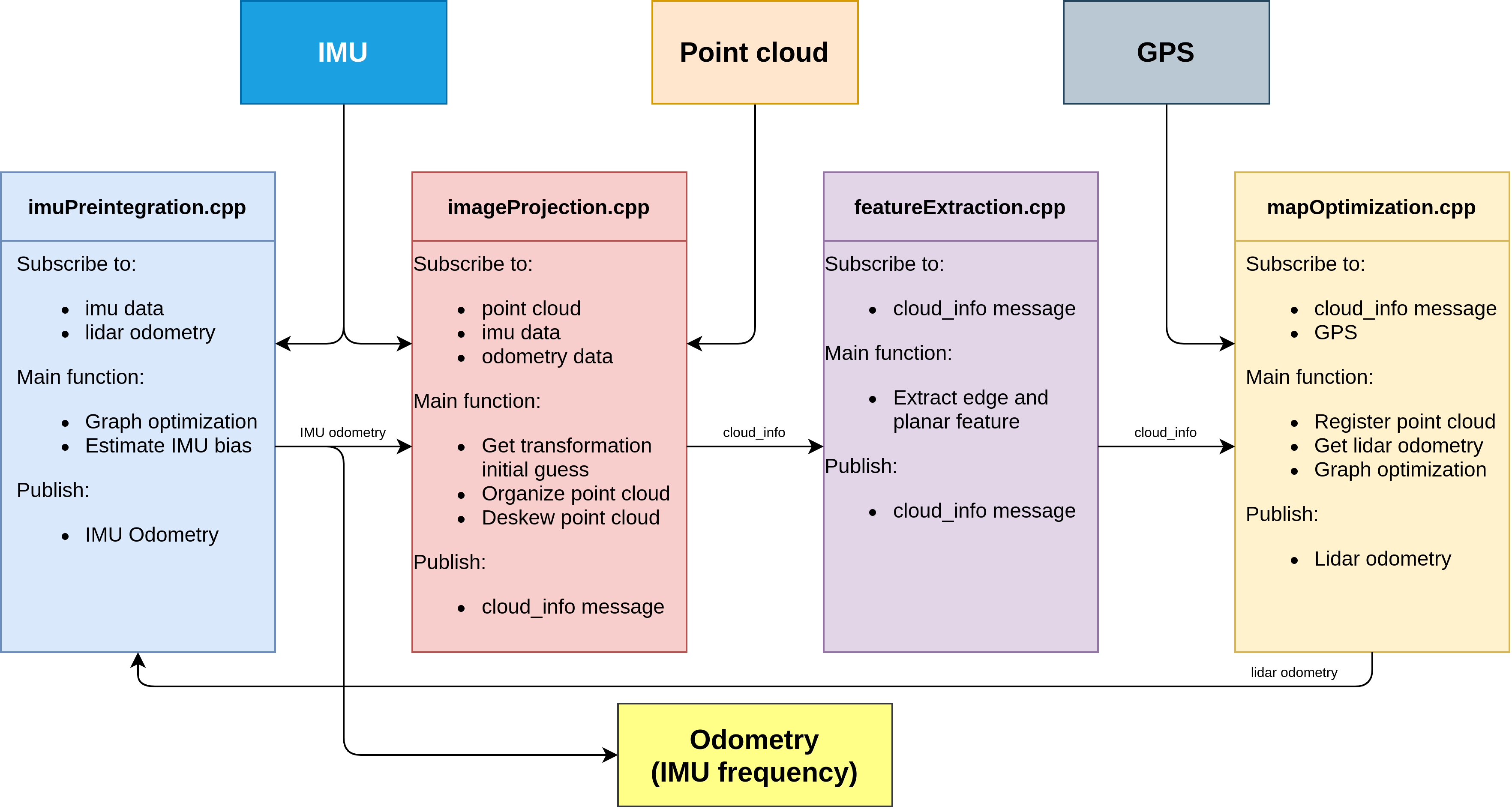
- A framework that achieves highly accurate, real-time mobile robot trajectory estimation and map-building. It formulates lidar-inertial odometry atop a factor graph, allowing a multitude of relative and absolute measurements, including loop closures, to be incorporated from different sources as factors into the system
Repository Information#
Original Repository link#
https://github.com/TixiaoShan/LIO-SAM
Required Sensors#
- LIDAR [Livox, Velodyne, Ouster]
- IMU [9-AXIS]
- GPS [OPTIONAL]
ROS Compatibility#
- ROS 1
- For ROS 2
Dependencies#
- ROS
- PCL
-
Gtsam (Georgia Tech Smoothing and Mapping library)
sudo add-apt-repository ppa:borglab/gtsam-release-4.0 sudo apt install libgtsam-dev libgtsam-unstable-dev
sudo apt-get install -y ros-melodic-navigation
sudo apt-get install -y ros-melodic-robot-localization
sudo apt-get install -y ros-melodic-robot-state-publisher
Build & Run#
1) Build#
mkdir -p ~/catkin_lio_sam/src
cd ~/catkin_lio_sam/src
git clone https://github.com/TixiaoShan/LIO-SAM.git
cd ..
catkin_make
source devel/setup.bash
2) Set parameters#
- Set topics and sensor settings on
lio_sam/config/params.yaml
3) Run#
# Run the Launch File
roslaunch lio_sam run.launch
# Play bag file in the other terminal
rosbag play xxx.bag --clock
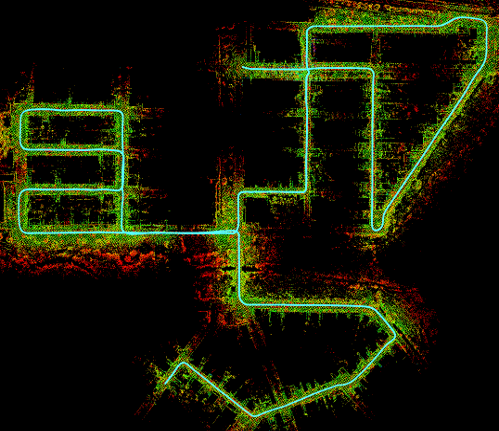
Example Result#
Paper#
Thank you for citing LIO-SAM (IROS-2020) if you use any of this code.
@inproceedings{liosam2020shan,
title={LIO-SAM: Tightly-coupled Lidar Inertial Odometry via Smoothing and Mapping},
author={Shan, Tixiao and Englot, Brendan and Meyers, Drew and Wang, Wei and Ratti, Carlo and Rus Daniela},
booktitle={IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
pages={5135-5142},
year={2020},
organization={IEEE}
}
Part of the code is adapted from LeGO-LOAM.
@inproceedings{legoloam2018shan,
title={LeGO-LOAM: Lightweight and Ground-Optimized Lidar Odometry and Mapping on Variable Terrain},
author={Shan, Tixiao and Englot, Brendan},
booktitle={IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
pages={4758-4765},
year={2018},
organization={IEEE}
}
Acknowledgements#
- LIO-SAM is based on LOAM (J. Zhang and S. Singh. LOAM: Lidar Odometry and Mapping in Real-time).