Components#
Open AD Kit is a component-based project designed to run on a variety of platforms with containerized services. Each Autoware function remains independently deployable, while the published images group closely related functions together to keep the runtime layout simpler.
Build Pipeline#
flowchart TB
ROS["ros:humble-ros-base-jammy<br/>ros:jazzy-ros-base-noble"] --> CB["common-base"]
CB --> CD["common-devel"]
CD --> SP["sensing-perception"]
CD --> LM["localization-mapping"]
CD --> PC["planning-control"]
CD --> VS["vehicle-system"]
CD --> API["api"]
CD --> VIZ["visualizer"]
CD --> SIM["simulator"]
SP --> UNI["universe"]
LM --> UNI
PC --> UNI
VS --> UNI
API --> UNI
VIZ --> UNI
SIM --> UNI
classDef ros fill:#334155,stroke:#64748b,color:#fff
classDef common fill:#1e3a5f,stroke:#3b82f6,color:#fff
classDef component fill:#14532d,stroke:#22c55e,color:#fff
classDef universe fill:#4c1d95,stroke:#a855f7,color:#fff
class ROS ros
class CB,CD common
class SP,LM,PC,VS,API,VIZ,SIM component
class UNI universeBuild Groups#
| Group | Description | Targets |
|---|---|---|
common |
Common base and development images | base, devel, base-cuda, devel-cuda |
component |
Component images | sensing-perception, sensing-perception-cuda, localization-mapping, planning-control, vehicle-system, api, visualizer, simulator |
universe |
Universe images (aggregate) | universe, universe-cuda |
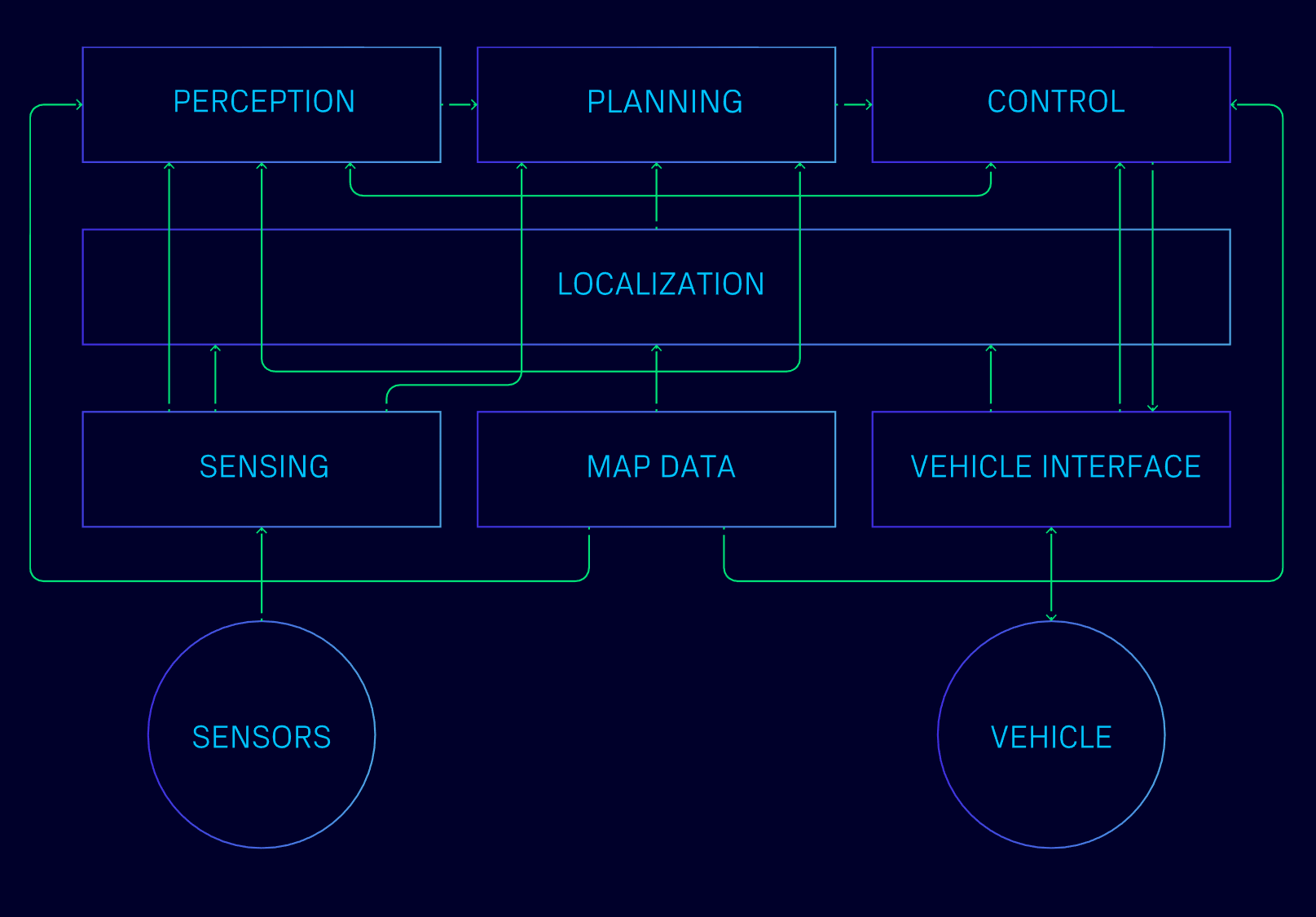
Autoware Components#
Sensing#
The sensing component is responsible for collecting data from the vehicle's sensors. The sensing component can be configured to collect data from a variety of sensors, including cameras, lidars, and radars. For more details, see the Autoware sensing design document.
Perception#
The perception component is responsible for processing the data from the vehicle's sensors and creating a map of the environment. The perception component can be configured to use a variety of perception algorithms, including object detection, tracking, and mapping. For more details, see the Autoware perception design document.
Mapping#
The mapping component is responsible for creating a map of the environment. The mapping component can be configured to use a variety of mapping algorithms, including occupancy grid mapping and point cloud mapping. For more details, see the Autoware mapping design document.
Localization#
The localization component is responsible for determining the vehicle's position in the map. The localization component can be configured to use a variety of localization algorithms, including GPS, IMU, and visual odometry. For more details, see the Autoware localization design document.
Planning#
The planning component is responsible for planning the vehicle's path. The planning component can be configured to use a variety of planning algorithms, including route planning, goal planning, and behavior planning. For more details, see the Autoware planning design document.
Control#
The control component is responsible for controlling the vehicle's actuators. The control component can be configured to use a variety of control algorithms, including PID and MPC. For more details, see the Autoware control design document.
Vehicle and System#
The vehicle-system image packages both the vehicle interface and system-level services used by the Open AD Kit deployments. On the functional side, the vehicle component manages vehicle-specific interfaces and state, while the system component provides health monitoring and related system services. For more details, see the Autoware vehicle design document.
API#
The API component is responsible for providing the AD API interface for the vehicle's state. The API component can be configured to enable or disable various interfaces. For more details, see the Autoware Interface design document.
Simulator#
The simulator image packages the Autoware simulator modules, providing a virtual environment for testing the autonomous driving stack without requiring real-world sensors or vehicles. It enables closed-loop simulation for validation, CI, and local development.
Visualizer#
The visualizer image provides a browser-accessible RViz environment via noVNC, allowing remote inspection of Autoware topics and state. It is designed as a lightweight component that can be deployed alongside the core stack or on a separate machine for remote monitoring.
Visualizer Settings#
The following environment variables can be configured when launching the visualizer container:
| Variable | Default Value | Possible Values | Description |
|---|---|---|---|
RVIZ_CONFIG |
/autoware/rviz/autoware.rviz |
Any valid path | The full path to the RViz configuration file inside the container |
REMOTE_DISPLAY |
true |
true, false |
(Recommended) Browser-based RViz display accessible from any device. Set to false to launch a local RViz2 display |
REMOTE_PASSWORD |
openadkit |
Any string without special characters | Password for the remote display (only used when REMOTE_DISPLAY=true) |
CARLA Interface#
The carla-interface image packages the autoware_carla_interface bridge, enabling closed-loop end-to-end simulation with the CARLA simulator. It connects Autoware's control outputs to CARLA's ego vehicle and translates CARLA sensor data into Autoware-compatible messages.