Introduction#
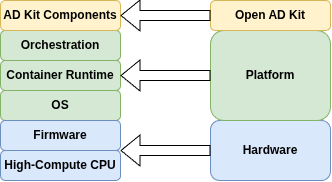
Open AD Kit adopts a modular, component-based architecture designed for flexibility, scalability, and platform independence. It leverages cloud-native principles and containerization to decompose Autoware into a collection of interoperable components. This approach allows developers to create customized autonomous driving (AD) systems by combining components to meet their specific needs.
Architecture#
The Autoware Foundation is a voting member of the SOAFEE (Scalable Open Architecture For the Embedded Edge) initiative, and the Autoware Open AD Kit is the first SOAFEE blueprint for the software-defined vehicle ecosystem.
Deployments#
A deployment is a running instance of Open AD Kit, a specific combination of Autoware components configured to achieve a particular task, such as a simulation or a full autonomous driving stack.
Deployments are defined using container orchestration files (e.g., docker-compose.yaml). This makes them portable and easy to reproduce across different environments, from a developer's laptop to edge devices in a vehicle. This container-based approach is a cornerstone of the Open AD Kit's cloud-native and platform-agnostic philosophy, aligning with standards like SOAFEE.
This modular structure allows users to start with a minimal deployment and incrementally add components as their system evolves.
For more details, see the Deployments.
Components#
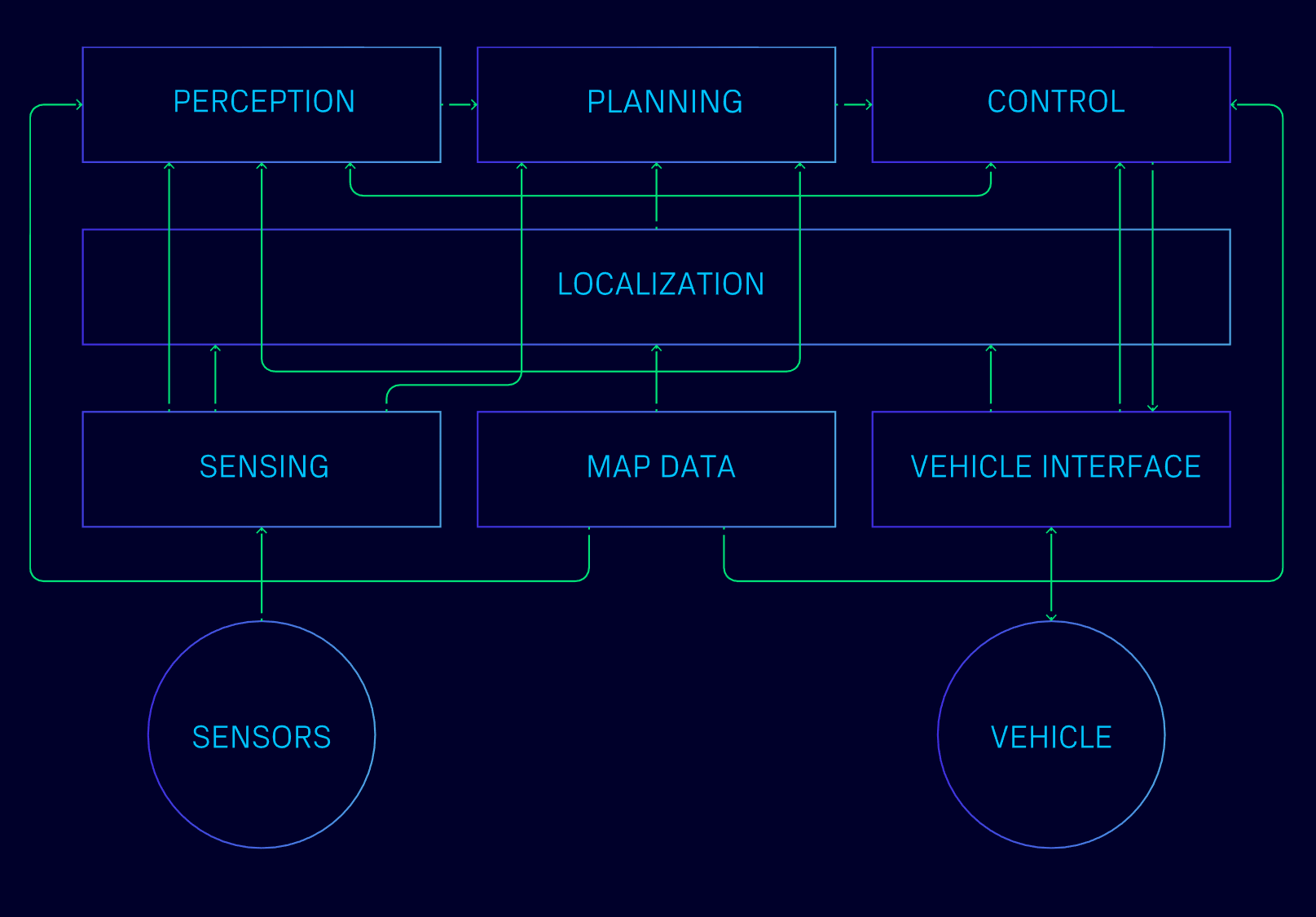
The core functional components of the Open AD Kit are derived from the main Autoware project. Each image packages a focused part of the autonomous driving pipeline, which makes it possible to compose different AD systems from a common container set.
The primary images include:
- Sensing and Perception: Collects and processes sensor data.
- Localization and Mapping: Manages maps and vehicle pose estimation.
- Planning and Control: Produces and follows the driving trajectory.
- Vehicle and System: Packages vehicle interfaces and system-level services in the
vehicle-systemimage. - API: Offers an interface for external systems to interact with the vehicle.
- Simulator: Allows testing the AD stack in a virtual environment.
- Visualizer: Provides a browser-accessible RViz environment for remote inspection.
These images communicate through ROS 2 middleware, and some deployments bridge isolated environments with Zenoh. For more details, see the Autoware components.
Key Features#
Modular Components#
Open AD Kit is a microservice-based project designed to run on a variety of platforms. Each component is independent and can be deployed independently.
- Independent images for sensing, perception, mapping, localization, planning, control, APIs, simulation, and visualization
- Multi-platform deployment supporting both amd64 and arm64 architectures
- Configurable ROS 2 container deployments with environment-driven composition
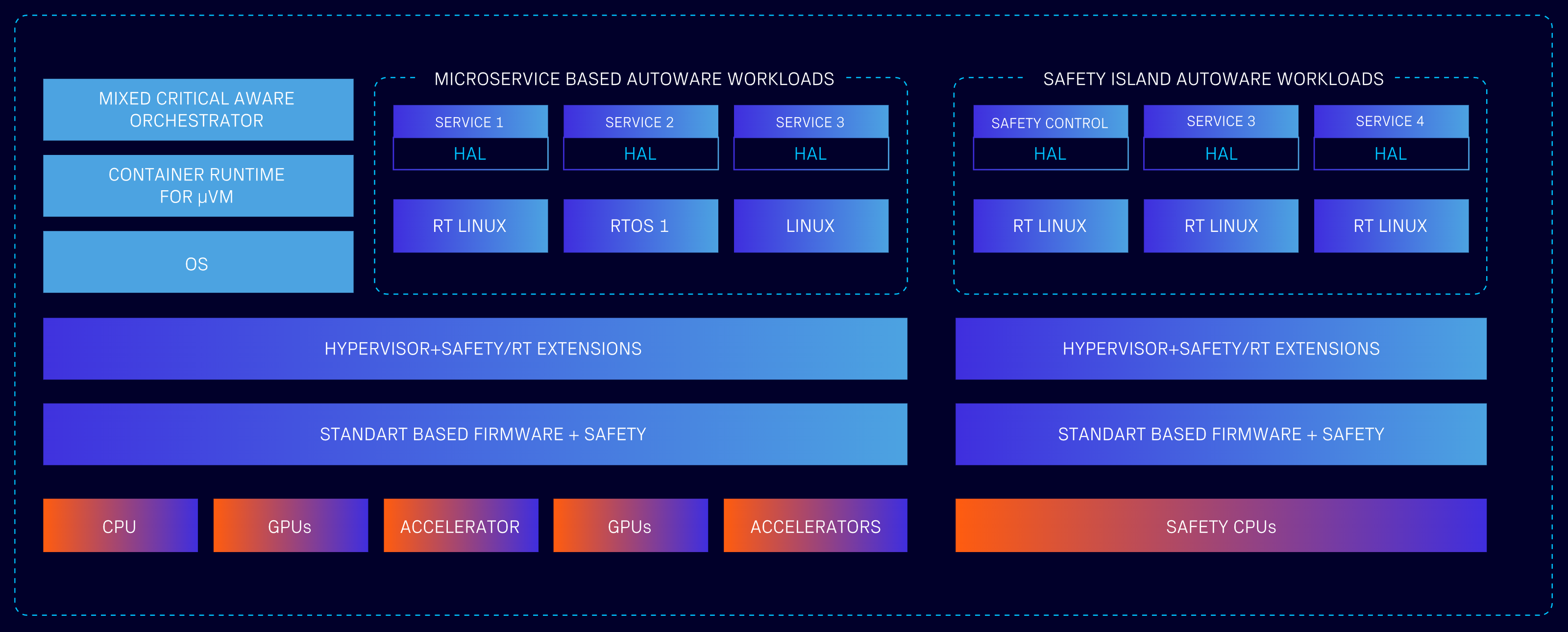
Mixed Criticality#
Open AD Kit supports mixed-criticality deployment, enabling separation of safety-critical and non-critical components. This architecture allows flexible deployment strategies where critical autonomous driving functions can run on certified hardware while monitoring and development components operate on standard platforms.
- Flexible deployment separating safety-critical and monitoring components
- Configurable criticality from development testing to production safety systems
- Hardware abstraction supporting safety-island compute architectures
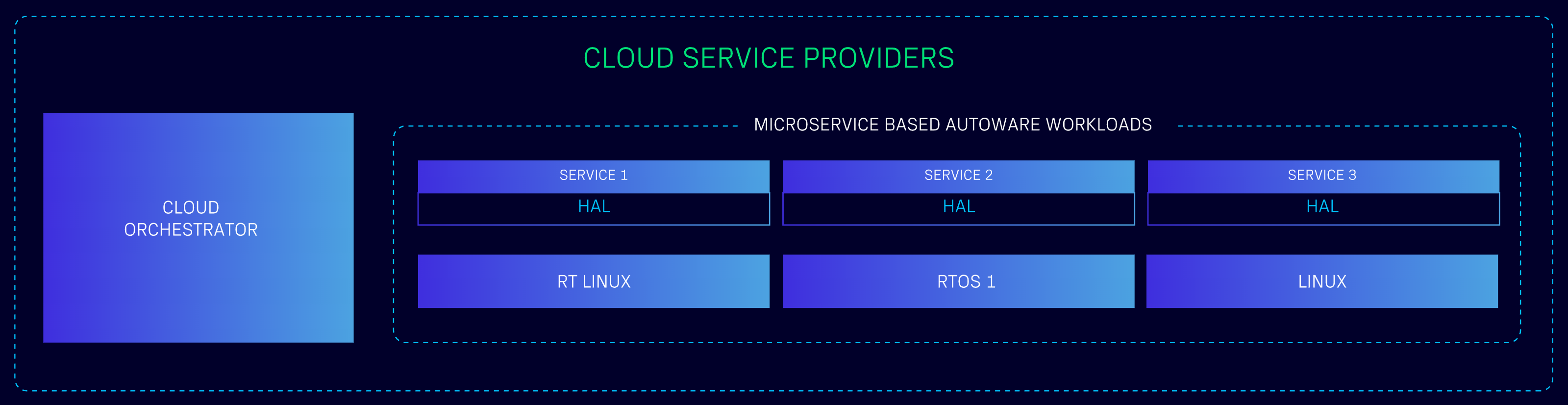
Cloud Native#
Open AD Kit leverages modern cloud-native technologies to deliver a scalable, portable AD stack.
- Seamless scaling from development laptops to production edge devices
- Hybrid cloud support bridging development and production environments
- Containerized runtimes using Docker Compose, Docker Bake, and platform-specific integrations such as AutoSD
Connected and Continuous#
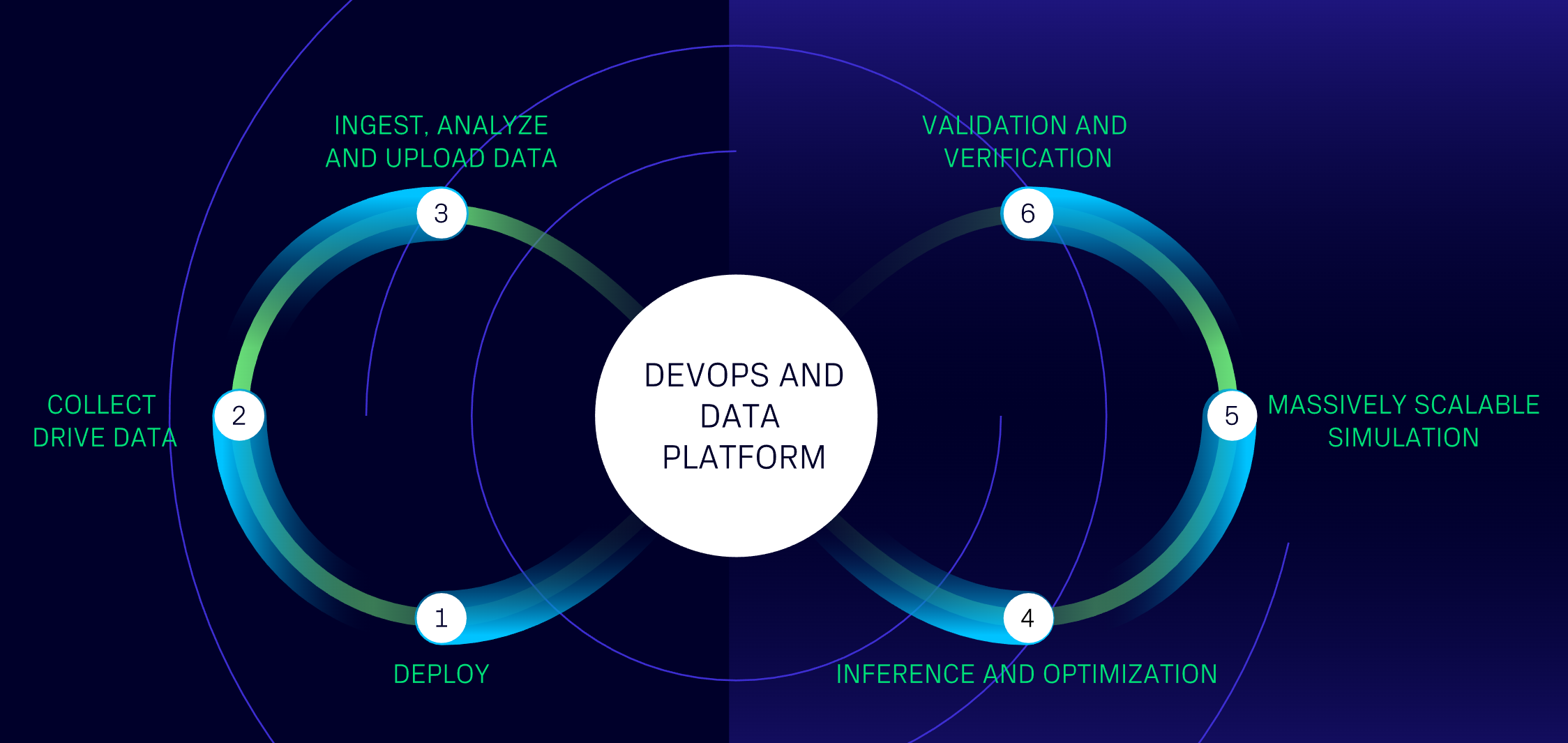
Open AD Kit envisions an always-connected, complete autonomous driving development and deployment platform spanning data collection, calibration, and map annotation to machine learning operations, open-source simulation, and system validation.
- Automated CI/CD with GitHub Actions integration
- Optimized build caching for faster deployment cycles
- Continuous testing in containerized environments
Supported Platforms#
Open AD Kit currently documents Ubuntu as the primary development host and AutoSD as the platform-specific deployment path available in this repository. EWAOL is planned but does not yet ship runnable assets here.
Development Platforms#
- Ubuntu 22.04, 24.04
Platform-specific deployment paths#
For more details, see the Supported SOAFEE Platforms.
Supported Hardware#
For detailed information on system requirements, tested hardware, and cloud instances, please refer to the Hardware section.