autoware_motion_velocity_obstacle_stop_module#
Overview#
The obstacle_stop module does the stop planning when there is a static obstacle near the trajectory.
Design#
Obstacle Filtering#
The obstacles meeting the following condition are determined as obstacles for stopping.
- The object type is for stopping according to
obstacle_filtering.object_type.*. - The lateral distance from the object to the ego's trajectory is smaller than
obstacle_filtering.max_lat_margin.obstacle_filtering.max_lat_margin_against_predicted_object_unknownis applied to the predicted object of unknown.- For the 'outside' objects, objects' future poses until 'obstacle_filtering.outside_obstacle.estimation_time_horizon' is also considered.
- The object
- does not cross the ego's trajectory (*1)
- and its collision time margin is large enough (*2)
- when
obstacle_filtering.ignore_crossing_obstacleis false.
NOTE#
*1: Crossing obstacles#
Crossing obstacle is the object whose orientation's yaw angle against the ego's trajectory is smaller than obstacle_filtering.crossing_obstacle.obstacle_traj_angle_threshold.
*2: Enough collision time margin#
We predict the collision area and its time by the ego with a constant velocity motion and the obstacle with its predicted path.
Then, we calculate a collision time margin which is the difference of the time when the ego will be inside the collision area and the obstacle will be inside the collision area.
When this time margin is smaller than obstacle_filtering.crossing_obstacle.collision_time_margin, the margin is not enough.
Stop Planning#
The role of the stop planning is keeping a safe distance with static vehicle objects or dynamic/static non vehicle objects.
The stop planning just inserts the stop point in the trajectory to keep a distance with obstacles.
The safe distance is parameterized as stop_planning.stop_margin.
When it stops at the end of the trajectory, and obstacle is on the same point, the safe distance becomes stop_planning.terminal_stop_margin.
When inserting the stop point, the required acceleration for the ego to stop in front of the stop point is calculated.
If the acceleration is less than common.min_strong_accel, the stop planning will be cancelled since this package does not assume a strong sudden brake for emergency.
Maintaining Safe Braking Distance While Following Leading Vehicle#
This function allows the obstacle_stop module to adjust the distance to a leading vehicle.
While the obstacle_cruise_module is the primary module for following a leading vehicle, this function provides a secondary safety role within the stopping logic.
The module assumes the leading vehicle will decelerate at a constant rate. It predicts where the vehicle will stop based on this deceleration. The module then places a stop point on the ego vehicle's trajectory, maintaining safety margin from the predicted stopping point.
Leading vehicle following is realized through the cooperation of this function and the velocity_smoother. Please note that the ego vehicle's behavior is influenced not only by the obstacle_stop settings but also by the velocity_smoother settings.
For objects moving slower than obstacle_velocity_threshold_enter_fixed_stop, the braking distance is not calculated. Instead, only the object's current position is used for stop position calculation.
Additionally, if this feature is disabled by use_rss_stop, stop planning is performed only for objects moving slower than obstacle_velocity_threshold_enter_fixed_stop.
Minor functions#
Prioritization of behavior module's stop point#
When stopping for a pedestrian walking on the crosswalk, the behavior module inserts the zero velocity in the trajectory in front of the crosswalk.
Also obstacle_cruise_module's stop planning also works, and the ego may not reach the behavior module's stop point since the safe distance defined in obstacle_cruise_module may be longer than the behavior module's safe distance.
To resolve this non-alignment of the stop point between the behavior module and this module, stop_planning.min_behavior_stop_margin is defined.
In the case of the crosswalk described above, this module inserts the stop point with a distance stop_planning.min_behavior_stop_margin at minimum between the ego and obstacle.
Holding the closest stop obstacle in target obstacles#
In order to keep the closest stop obstacle in the target obstacles against the perception's detection instability, we check whether it is disappeared or not from the target obstacles in the check_consistency function.
If the previous closest stop obstacle is removed from the lists, we keep it in the lists for obstacle_filtering.stop_obstacle_hold_time_threshold seconds.
Note that if a new stop obstacle appears and the previous closest obstacle removes from the lists, we do not add it to the target obstacles again.
Holding the previous stop point if necessary#
When the ego stops for the front obstacle or pointcloud, even though the obstacle does not move, the detected position of the obstacle may change due to the perception's detection noise. In this case, the ego will start driving a little bit.
In order to avoid the ego to restart, we keep the previous stop point if the ego's velocity is less than stop_planning.hold_stop_velocity_threshold and the distance between the current and previous stop points is less than stop_planning.hold_stop_distance_threshold.
Stop point adjustment on a curve#
When the ego stops on a curve road, since the stop margin is a bit long by default for the curve road, as shown in the following figure, the object B will come between the ego and object A, which may be dangerous.
To avoid this cut-in, the feature to use the shorter stop margin than usual on a curve can be used by enabling stop_planning.stop_on_curve.enable_approaching.
The following figure shows the logic.
- First, calculate the blue point where the straight driving footprint of the each future ego's pose collides with the front object (object A).
- Then, calculate the stop point
stop_planning.stop_on_curve.additional_stop_marginbehind the above blue ego's pose.stop_planning.stop_on_curve.min_stop_marginwill be kept at minimum between the ego and object.

Sudden stop suppression#
- Enabling
obstacle_filtering.suppress_sudden_stopwill make the deceleration for the stop higher thanlimit_min_accby force to suppress the sudden obstacle stop.
Visualization#
Detection area#
Green polygons which is a detection area is visualized by detection_polygons in the ~/debug/marker topic.
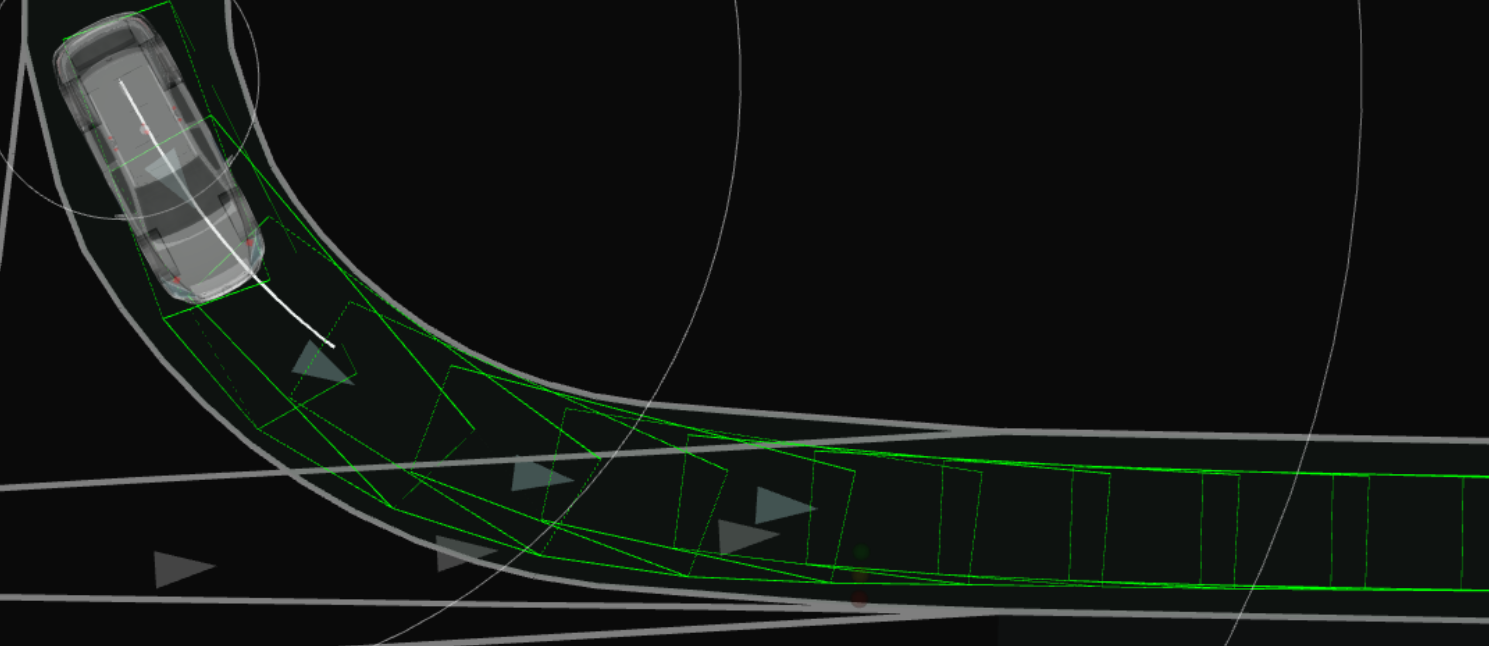
Collision points#
Red points which are collision points with obstacle are visualized by *_collision_points for each behavior in the ~/debug/marker topic.
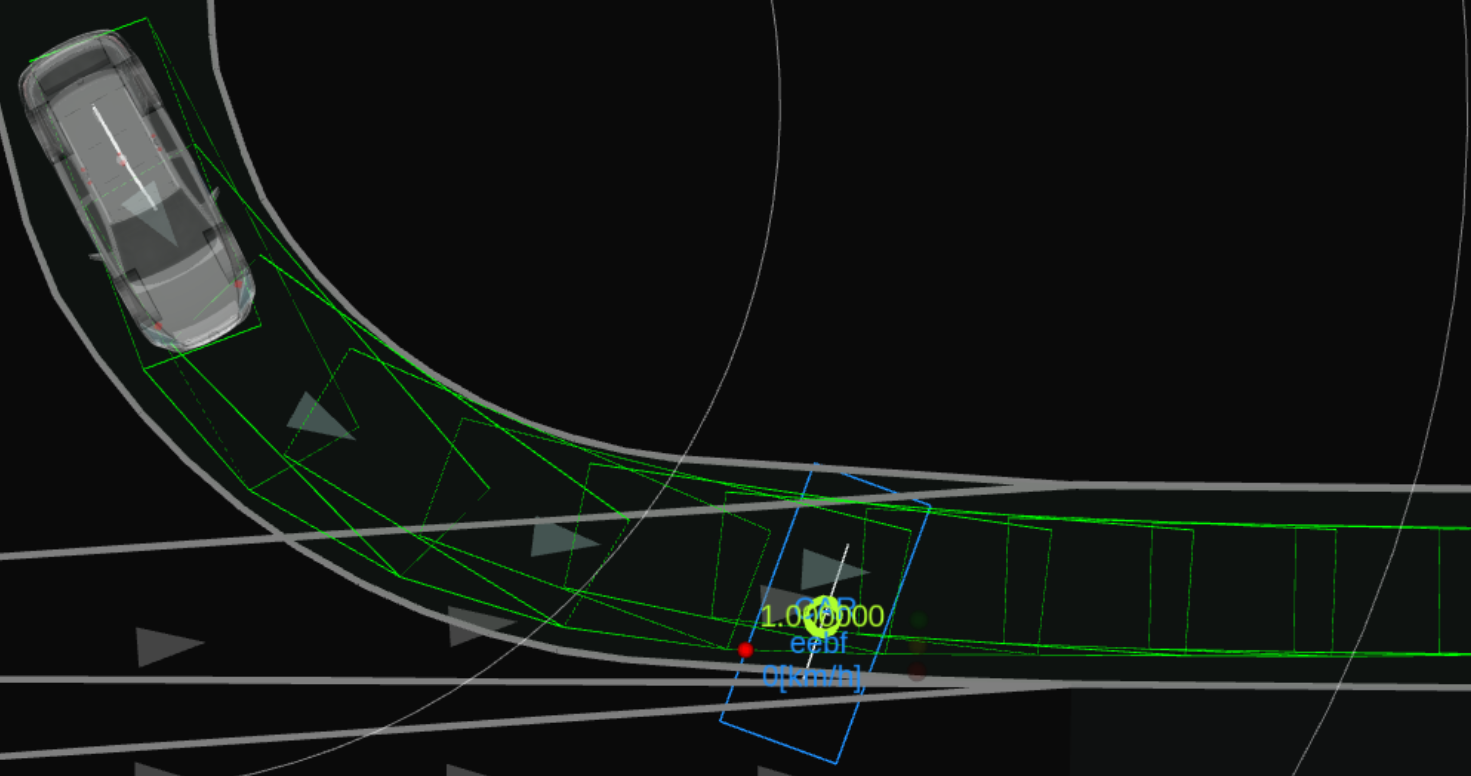
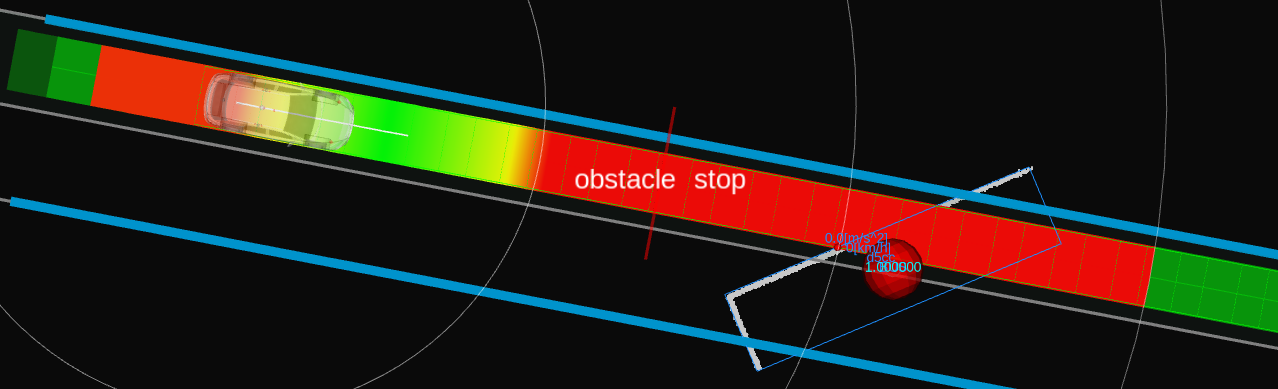
Obstacle for stop#
Red sphere which is an obstacle for stop is visualized by obstacles_to_stop in the ~/debug/marker topic.
Red wall which means a safe distance to stop if the ego's front meets the wall is visualized in the ~/virtual_wall topic.
Usage#
This module is activated if the launch parameter launch_obstacle_stop_module is set to true.
e.g. launcher/autoware_launch/autoware_launch/config/planning/preset/default_preset.yaml
```yaml
motion velocity planner modules#
- arg: name: launch_obstacle_stop_module default: "true" ```
That will trigger autoware_universe/launch/tier4_planning_launch/launch/scenario_planning/lane_driving/motion_planning/motion_planning.launch.xml to assemble launch config for motion_velocity_planner.
Finally motion_velocity_planner will load obstacle_stop_module as plugin.
```xml