Creating maps#
Autoware requires a pointcloud map and a vector map for the vehicle's operating environment. (Check the map design documentation page for the detailed specification).
This page explains how users can create maps that can be used for Autoware.
Creating a point cloud map#
Traditionally, a Mobile Mapping System (MMS) is used in order to create highly accurate large-scale point cloud maps. However, since a MMS requires high-end sensors for precise positioning, its operational cost can be very expensive and may not be suitable for a relatively small driving environment. Alternatively, a Simultaneous Localization And Mapping (SLAM) algorithm can be used to create a point cloud map from recorded LiDAR scans. Some of the useful open-source SLAM implementations are listed in this page.
If you prefer proprietary software that is easy to use, you can try a fully automatic mapping tool from MAP IV, Inc., MapIV Engine. They currently provide a trial license for Autoware users free of charge.
Creating a vector map#
Quick way to create simple maps#
bag2lanelet is a tool to create virtual lanes from self-location data. Whether in a real environment or a simulation, you can use this tool to generate simple lanelets from a rosbag with self-location information, allowing you to quickly test Autoware's performance. A key use case for this tool is to emulate autonomous driving on routes that were initially driven manually.
However, it is important to note that this tool has very limited functionalities and can only generate single-lane maps. To enable more comprehensive mapping and navigation capabilities, we recommend using the 'Vector Map Builder' described in the next section.
Tools for a vector map creation#
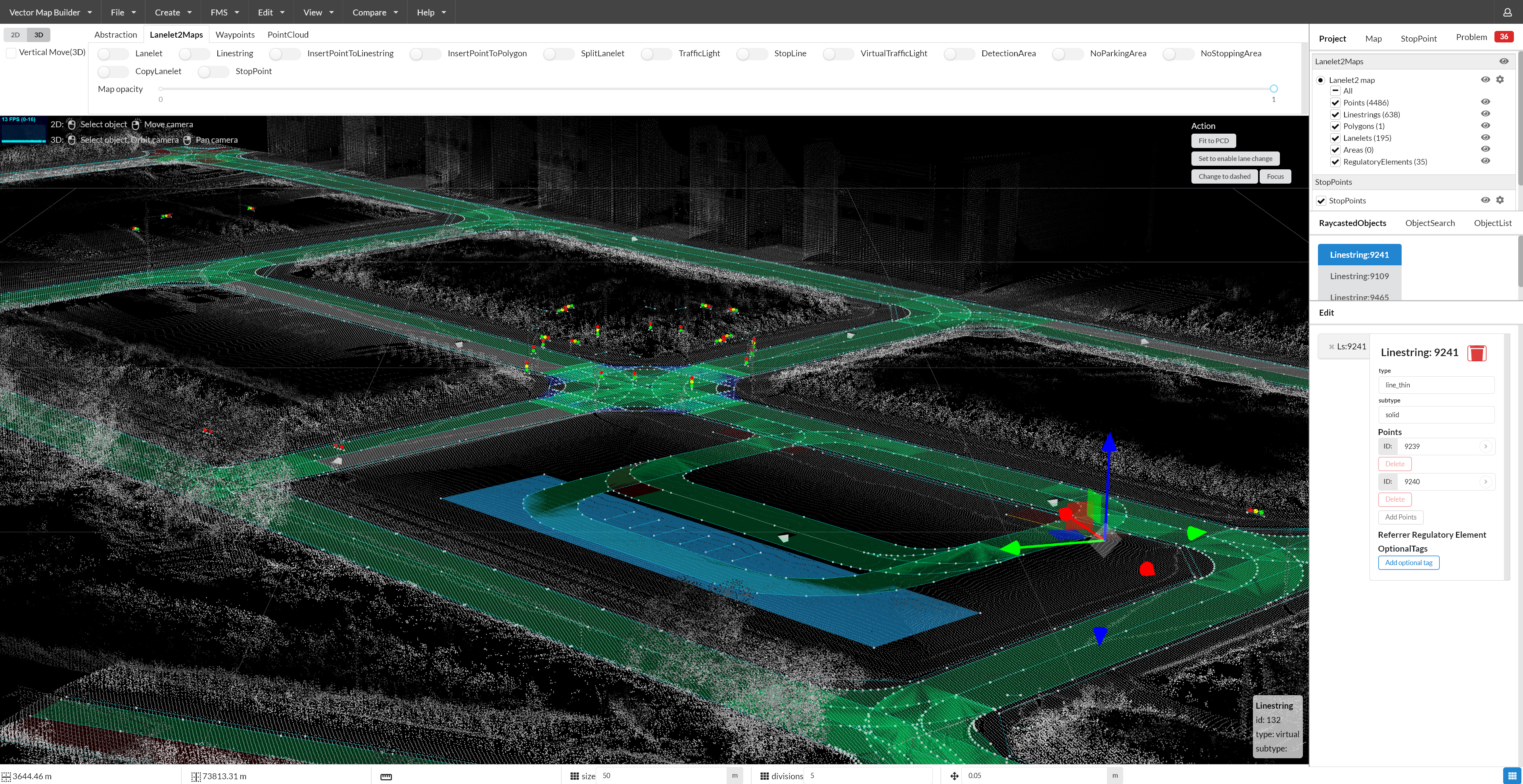
The recommended way to create an Autoware-compatible vector map is to use Vector Map Builder, a free web-based tool provided by TIER IV, Inc.. Vector Map Builder allows you to create lanes and add additional regulatory elements such as stop signs or traffic lights using a point cloud map as a reference.
For open-source software options, MapToolbox is a plugin for Unity specifically designed to create Lanelet2 maps for Autoware. Although JOSM is another open-source tool that can be used to create Lanelet2 maps, be aware that a number of modifications must be done manually to make the map compatible with Autoware. This process can be tedious and time-consuming, so the use of JOSM is not recommended.
Autoware-compatible map providers#
If it is not possible to create HD maps yourself, you can use a mapping service from the following Autoware-compatible map providers instead:
The table below shows each company's mapping technology and the types of HD maps they support.
| Company | Mapping technology | Available maps |
|---|---|---|
| MAP IV, Inc. | SLAM | Point cloud and vector maps |
| AISAN TECHNOLOGY CO., LTD. | MMS | Point cloud and vector maps |
| TomTom | MMS | Vector map* |
Note
Maps provided by TomTom use their proprietary AutoStream format, not Lanelet2. The open-source AutoStreamForAutoware tool can be used to convert an AutoStream map to a Lanelet2 map. However, the converter is still in its early stages and has some known limitations.