ISCLOAM#
What is ISCLOAM?#
- ISCLOAM presents a robust loop closure detection approach by integrating both geometry and intensity information.
Repository Information#
Original Repository link#
https://github.com/wh200720041/iscloam
Required Sensors#
- LIDAR [Velodyne]
ROS Compatibility#
- ROS 1
Dependencies#
- Ubuntu 64-bit 18.04
- ROS Melodic ROS Installation
- Ceres Solver Ceres Installation
- PCL PCL Installation
- Gtsam GTSAM Installation
- OpenCV OPENCV Installation
- Trajectory visualization
For visualization purpose, this package uses hector trajectory sever, you may install the package by
sudo apt-get install ros-melodic-hector-trajectory-server
Build and Run#
1. Clone repository#
cd ~/catkin_ws/src
git clone https://github.com/wh200720041/iscloam.git
cd ..
catkin_make -j1
source ~/catkin_ws/devel/setup.bash
2. Set Parameter#
Change the bag location and sensor parameters on launch files.

3. Launch#
roslaunch iscloam iscloam.launch
if you would like to generate the map of environment at the same time, you can run
roslaunch iscloam iscloam_mapping.launch
Note that the global map can be very large, so it may takes a while to perform global optimization, some lag is expected between trajectory and map since they are running in separate thread. More CPU usage will happen when loop closure is identified.
Example Result#
Watch demo video at Video Link
Ground Truth Comparison#
Green: ISCLOAM Red: Ground Truth
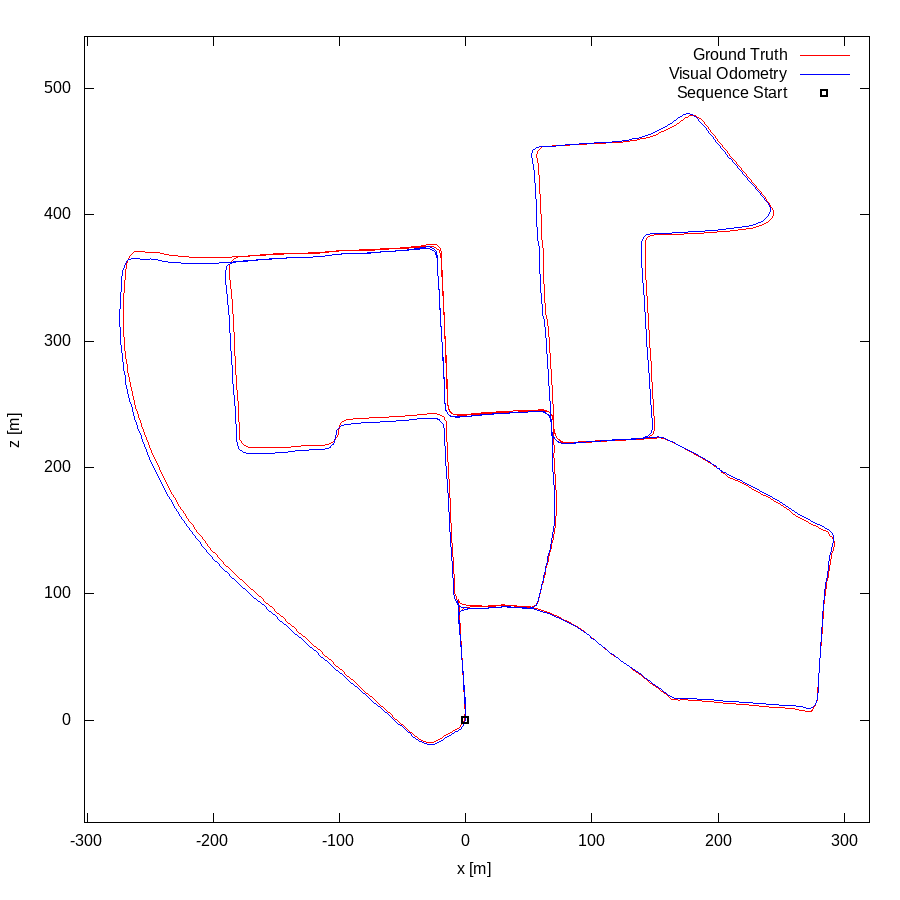
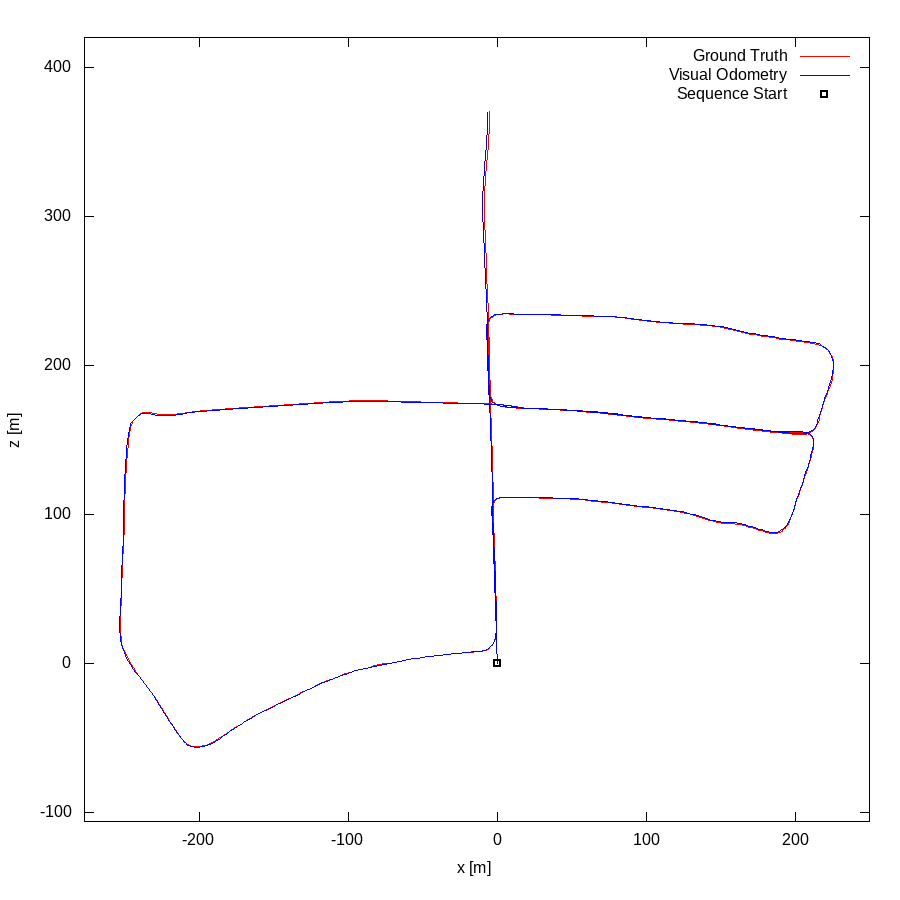
KITTI sequence 00 KITTI sequence 05
Citation#
If you use this work for your research, you may want to cite the paper below, your citation will be appreciated
@inproceedings{wang2020intensity,
author={H. {Wang} and C. {Wang} and L. {Xie}},
booktitle={2020 IEEE International Conference on Robotics and Automation (ICRA)},
title={Intensity Scan Context: Coding Intensity and Geometry Relations for Loop Closure Detection},
year={2020},
volume={},
number={},
pages={2095-2101},
doi={10.1109/ICRA40945.2020.9196764}
}
Acknowledgements#
Thanks for A-LOAM and LOAM(J. Zhang and S. Singh. LOAM: Lidar Odometry and Mapping in Real-time) and LOAM_NOTED.
Author: Wang Han, Nanyang Technological University, Singapore