Lidar-Imu Calibration#
Overview#
Lidar-Imu calibration is important for localization and mapping algorithms which used in autonomous driving. In this tutorial, we will calibrate the lidar and imu sensors with using OA-LICalib tool which is developed by APRIL Lab at Zhejiang University in China.
OA-LICalib is calibration method for the LiDAR-Inertial systems within a continuous-time batch optimization, where intrinsic of both sensors, the time offset between sensors and the spatial-temporal extrinsic between sensors are calibrated comprehensively without explicit hand-crafted targets.
Warning
This calibration tool is developed with ROS 1, and it is not compatible with ROS 2. So, we are providing a docker image which has ROS 1 and all necessary packages. In the calibration instructions, we will ask you to install docker on your system.
ROS 2 Bag example of our calibration process for tutorial_vehicle
Files: rosbag2_2023_08_18-14_42_12_0.db3
Bag size: 12.4 GiB
Storage id: sqlite3
Duration: 202.140s
Start: Aug 18 2023 14:42:12.586 (1692358932.586)
End: Aug 18 2023 14:45:34.727 (1692359134.727)
Messages: 22237
Topic information: Topic: /sensing/gnss/sbg/ros/imu/data | Type: sensor_msgs/msg/Imu | Count: 20215 | Serialization Format: cdr
Topic: /sensing/lidar/top/pointcloud_raw | Type: sensor_msgs/msg/PointCloud2 | Count: 2022 | Serialization Format: cdr
Data Collection and Preparation#
For Lidar-Imu calibration, there is a need for a ROS 1 bag file which contains
sensor_msgs/PointCloud2 and sensor_msgs/Imu messages.
To obtain good results as a result of the calibration process,
you need to move the sensors in all 6 axes (x, y, z, roll, pitch, yaw) while collecting data.
Therefore, holding the sensors in your hand while data collection will get better results,
but you can also collect data on the vehicle. If you are collecting data on the vehicle,
you should draw figures of eights and grids.
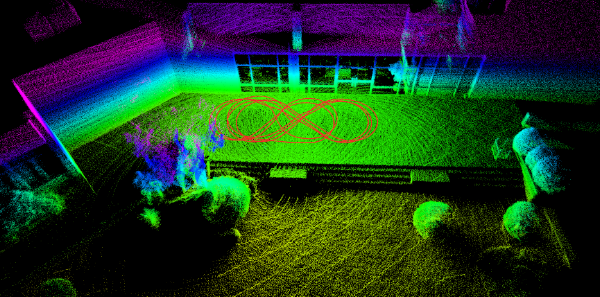
Moreover, the calibration accuracy is affected by the data collection environment. You should collect your data in a place that contains a lot of flat surfaces, and indoor spaces are the best locations under these conditions. However, you can also achieve good results outdoors. When collecting data, make sure to draw figures of eights and grids, capturing data from every angle.
Converting ROS 2 Bag to ROS 1 Bag#
If you collected your calibration data in ROS 2, you can convert it to ROS 1 bag file with the following instructions:
- Split your ROS 2 bag file if it contains non-standard message topics
(you can only select
sensor_msgs/PointCloud2andsensor_msgs/Imumessages), and convert your split ROS 2 bag file to ROS 1 bag.
Create a yaml file with name out.yaml which contains your lidar and imu topics:
output_bags:
- uri: splitted_bag
topics: [/your/imu/topic, /your/pointcloud/topic]
Split your ROS 2 bag file:
ros2 bag convert -i <YOUR-ROS2-BAG-FOLDER> -o out.yaml
Convert your split ROS 2 bag file to ROS 1 bag file:
# install bag converter tool (https://gitlab.com/ternaris/rosbags)
pip3 install rosbags
# convert bag
rosbags-convert <YOUR-SPLITTED-ROS2-BAG-FOLDER> --dst <OUTPUT-BAG-FILE>
Lidar-Imu Calibration#
As a first step, we need to install docker on our system. You can install docker using this link, or you can use the following commands to install docker using the Apt repository.
Set up Docker's Apt repository:
# Add Docker's official GPG key:
sudo apt-get update
sudo apt-get install ca-certificates curl gnupg
sudo install -m 0755 -d /etc/apt/keyrings
curl -fsSL https://download.docker.com/linux/ubuntu/gpg | sudo gpg --dearmor -o /etc/apt/keyrings/docker.gpg
sudo chmod a+r /etc/apt/keyrings/docker.gpg
# Add the repository to Apt sources:
echo \
"deb [arch="$(dpkg --print-architecture)" signed-by=/etc/apt/keyrings/docker.gpg] https://download.docker.com/linux/ubuntu \
"$(. /etc/os-release && echo "$VERSION_CODENAME")" stable" | \
sudo tee /etc/apt/sources.list.d/docker.list > /dev/null
sudo apt-get update
Install the Docker packages:
sudo apt-get install docker-ce docker-ce-cli containerd.io docker-buildx-plugin docker-compose-plugin
To check if docker is installed correctly, you can run the following command:
sudo docker run hello-world
Before finishing the installation, we need to add our user to the docker group. This will allow us to run docker commands without sudo:
sudo groupadd docker
sudo usermod -aG docker $USER
Warning
After running the above command, you need to logout and login again to be able to run docker commands without sudo.
After installing docker, we are ready to run the calibration tool. As a first step, you should clone the calibration repository:
git clone https://github.com/leo-drive/OA-LICalib.git
Then, you need to build the docker image:
cd OA-LICalib/docker
sudo docker build -t oalicalib .
After building the docker image, you need to create a container from the image:
Warning
You need to update REPO_PATH with the path to the cloned repository on your system.
export REPO_PATH="/path/to/OA-LICalib"
docker run -it --env="DISPLAY" --volume="$HOME/.Xauthority:/root/.Xauthority:rw" --volume="/tmp/.X11-unix:/tmp/.X11-unix:rw" --volume="$REPO_PATH:/root/catkin_oa_calib/src/OA-LICalib" oalicalib bash
Before running the calibration tool, you should change some parameters from the
configuration file. You can find the configuration file in the OA-LICalib/config
Change the following parameters in the configuration file as your topics and sensors:
- These are the lidar model options: VLP_16_packet, VLP_16_points, VLP_32E_points, VLS_128_points, Ouster_16_points, Ouster_32_points, Ouster_64_points, Ouster_128_points, RS_16
start_timeandend_timeare the interval of the rosbag that you want to use
path_bagis the path to the rosbag file, but you need to give the path inside the container, not your local system. For example, if you have a rosbag file in theOA-LICalib/datadirectory, you need to give the path as/root/calib_ws/src/OA-LICalib/data/rosbag2_2023_08_18-14_42_12_0.bag
topic_lidar: /sensing/lidar/top/pointcloud_raw
topic_imu: /sensing/gnss/sbg/ros/imu/data
LidarModel: VLP_16_SIMU
selected_segment:
- {
start_time: 0,
end_time: 40,
path_bag: /root/calib_ws/src/OA-LICalib/data/rosbag2_2023_08_18-14_42_12_0.bag,
}
After creating the container and changing parameters, you can build and run the calibration tool:
cd /root/catkin_oa_calib
catkin_make -DCATKIN_WHITELIST_PACKAGES=""
source devel/setup.bash
roslaunch oalicalib li_calib.launch
After running the calibration tool, you can track the calibration process with connecting to the container on other terminal. To connect to the container, you can run the following command:
xhost +local:docker
docker exec -it <container_name> bash
Warning
You need to replace docker ps command. This command's
output should be something like this and you can find your container name
in the last column:
CONTAINER ID IMAGE COMMAND CREATED STATUS PORTS NAMES
adb8b559c06e calib:v1 "/ros_entrypoint.sh …" 6 seconds ago Up 5 seconds your_awesome_container_name
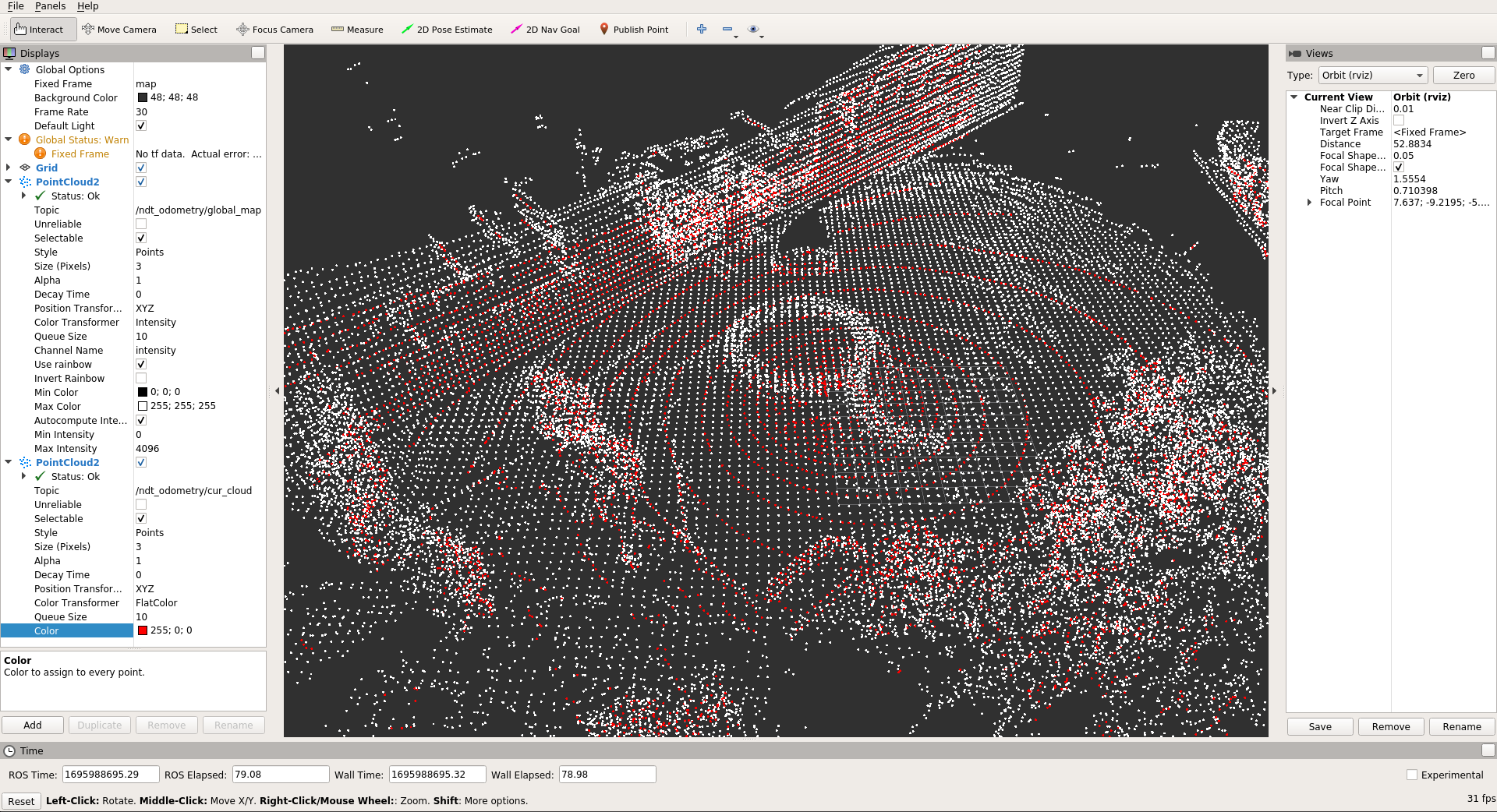
After connecting to the container, you can see the calibration process with running the Rviz. After running the Rviz, you need to add the following topics to the Rviz:
- /ndt_odometry/global_map
- /ndt_odometry/cur_cloud
rviz
If /ndt_odometry/global_map looks distorted, you should tune ndt parameters
in the OA-LICalib/config/simu.yaml file.
To achieve better results, you can tune the parameters in the config/simu.yaml file. The parameters are explained below:
| Parameter | Value |
|---|---|
| ndtResolution | Resolution of NDT grid structure (VoxelGridCovariance) 0,5 for indoor case and 1.0 for outdoor case |
| ndt_key_frame_downsample | Resolution parameter for voxel grid downsample function |
| map_downsample_size | Resolution parameter for voxel grid downsample function |
| knot_distance | time interval |
| plane_motion | set true if you collect data from vehicle |
| gyro_weight | gyrometer sensor output’s weight for trajectory estimation |
| accel_weight | accelerometer sensor output’s weight for trajectory estimation |
| lidar_weight | lidar sensor output’s weight for trajectory estimation |