Ackermann kinematic model#
Autoware now supports control inputs for vehicles based on an Ackermann kinematic model.
This section introduces you a brief concept of the Ackermann kinematic model
and explains how Autoware controls it.
Please remember,
Autoware control output (/control/command/control_cmd)
publishes lateral and longitudinal commands according to the Ackermann kinematic model.
- If your vehicle does not suit the Ackermann kinematic model, you have to modify the control commands. Another document gives you an example how to convert your Ackermann kinematic model control inputs into a differential drive model.
Geometry#
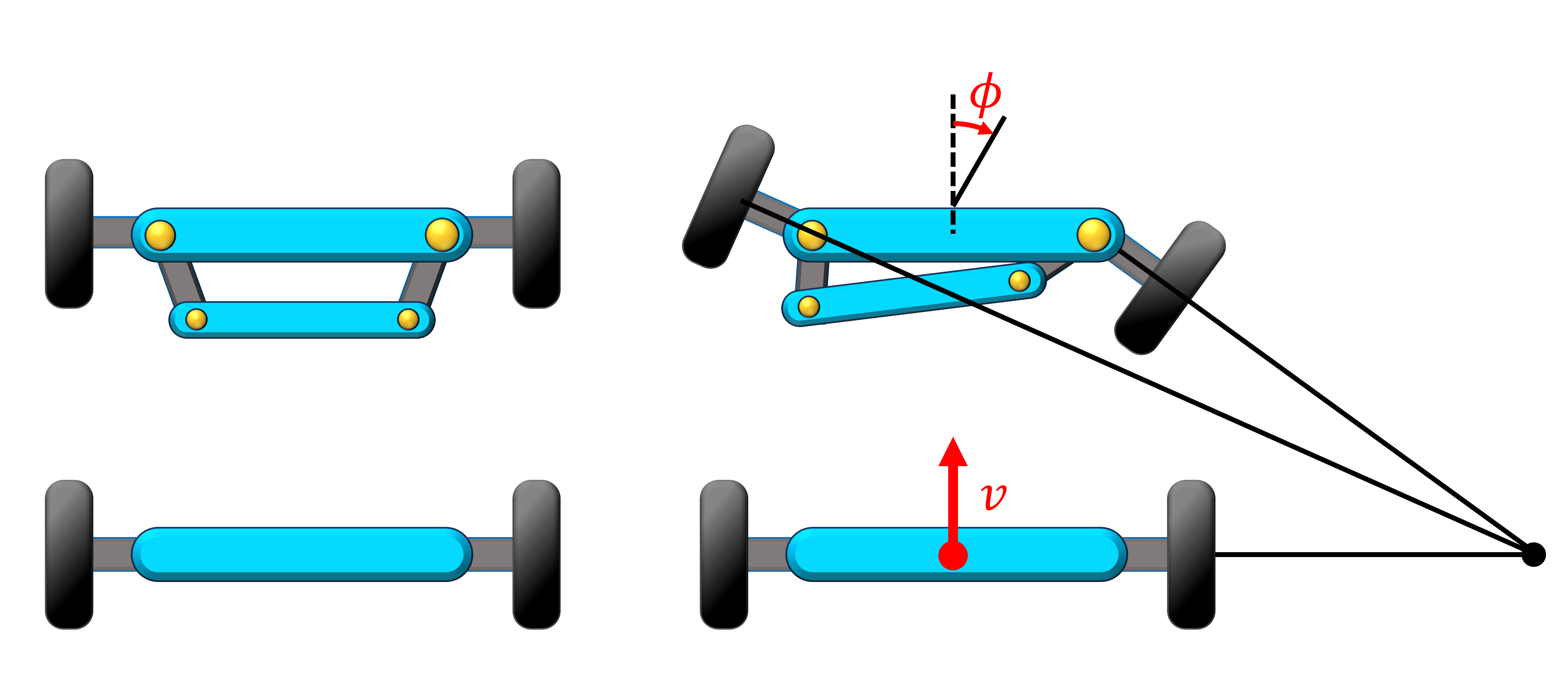
The basic style of the Ackermann kinematic model has four wheels with an Ackermann link on the front,
and it is powered by the rear wheels.
The key point of Ackermann kinematic model is
that the axes of all wheels intersect at the same point,
which means
all wheels will trace a circular trajectory with a different radii but a common center point
(See the figure below).
Therefore,
this model has a great advantage that it minimizes the slippage of the wheels
and prevents tires from getting worn soon.
In general, the Ackermann kinematic model accepts the longitudinal speed \(v\) and the steering angle \(\phi\) as inputs. In autoware, \(\phi\) is positive if it is steered counterclockwise, so the steering angle in the figure below is actually negative.
Control#
Autoware publishes a ROS 2 topic named control_cmd from several types of publishers.
A control_cmd topic is a AckermannControlCommand type message that contains
builtin_interfaces/Time stamp
autoware_auto_control_msgs/AckermannLateralCommand lateral
autoware_auto_control_msgs/LongitudinalCommand longitudinal
where,
builtin_interfaces/Time stamp
float32 steering_tire_angle
float32 steering_tire_rotation_rate
builtin_interfaces/Time stamp
float32 speed
float32 accelaration
float32 jerk
See the AckermannLateralCommand.idl and LongitudinalCommand.idl for details.
The vehicle interface should realize these control commands through your vehicle's control device.
Moreover, Autoware also provides brake commands, light commands, and more (see vehicle interface design), so the vehicle interface module should be applicable to these commands as long as there are devices available to handle them.