Crosswalk attribute#
Behavior velocity planner's crosswalk module plans velocity to stop or decelerate for pedestrians approaching or walking on a crosswalk. In order to operate that, we will add crosswalk attribute to our lanelet2 map.
Creating a crosswalk attribute#
In order to create a crosswalk on your map, please follow these steps:
- Click
Abstractionbutton on top panel. - Select
Crosswalkfrom the panel. - Click and draw crosswalk on your pointcloud map.
You can see these steps in the crosswalk creating demonstration video:
Testing created crosswalk with planning simulator#
After the completing of creating the map, we need to save it.
To that please click File --> Export Lanelet2Maps then download.
After the download is finished, we need to put lanelet2 map and pointcloud map on the same location. The directory structure should be like this:
+ <YOUR-MAP-DIRECTORY>/
+ ├─ pointcloud_map.pcd
+ └─ lanelet2_map.osm
If your .osm or .pcd map file's name is different from these names, you need to update autoware.launch.xml:
<!-- Map -->
- <arg name="lanelet2_map_file" default="lanelet2_map.osm" description="lanelet2 map file name"/>
+ <arg name="lanelet2_map_file" default="<YOUR-LANELET-MAP-NAME>.osm" description="lanelet2 map file name"/>
- <arg name="pointcloud_map_file" default="pointcloud_map.pcd" description="pointcloud map file name"/>
+ <arg name="pointcloud_map_file" default="<YOUR-POINTCLOUD-MAP-NAME>.pcd" description="pointcloud map file name"/>
Now we are ready to launch the planning simulator:
ros2 launch autoware_launch planning_simulator.launch.xml map_path:=<YOUR-MAP-FOLDER-DIR> vehicle_model:=<YOUR-VEHICLE-MODEL> sensor_model:=<YOUR-SENSOR-KIT>
Example for tutorial_vehicle:
ros2 launch autoware_launch planning_simulator.launch.xml map_path:=$HOME/Files/autoware_map/tutorial_map/ vehicle_model:=tutorial_vehicle sensor_model:=tutorial_vehicle_sensor_kit vehicle_id:=tutorial_vehicle
- Click
2D Pose Estimatebutton on rviz or pressPand give a pose for initialization. - Click
2D Goal Posebutton on rviz or pressGand give a pose for goal point. - We need to add pedestrians to crosswalk, so activate interactive pedestrians from
Tool Propertiespanel on rviz. - After that, please press
Shift, then click right click button for inserting pedestrians. - You can control inserted pedestrian via dragging right click.
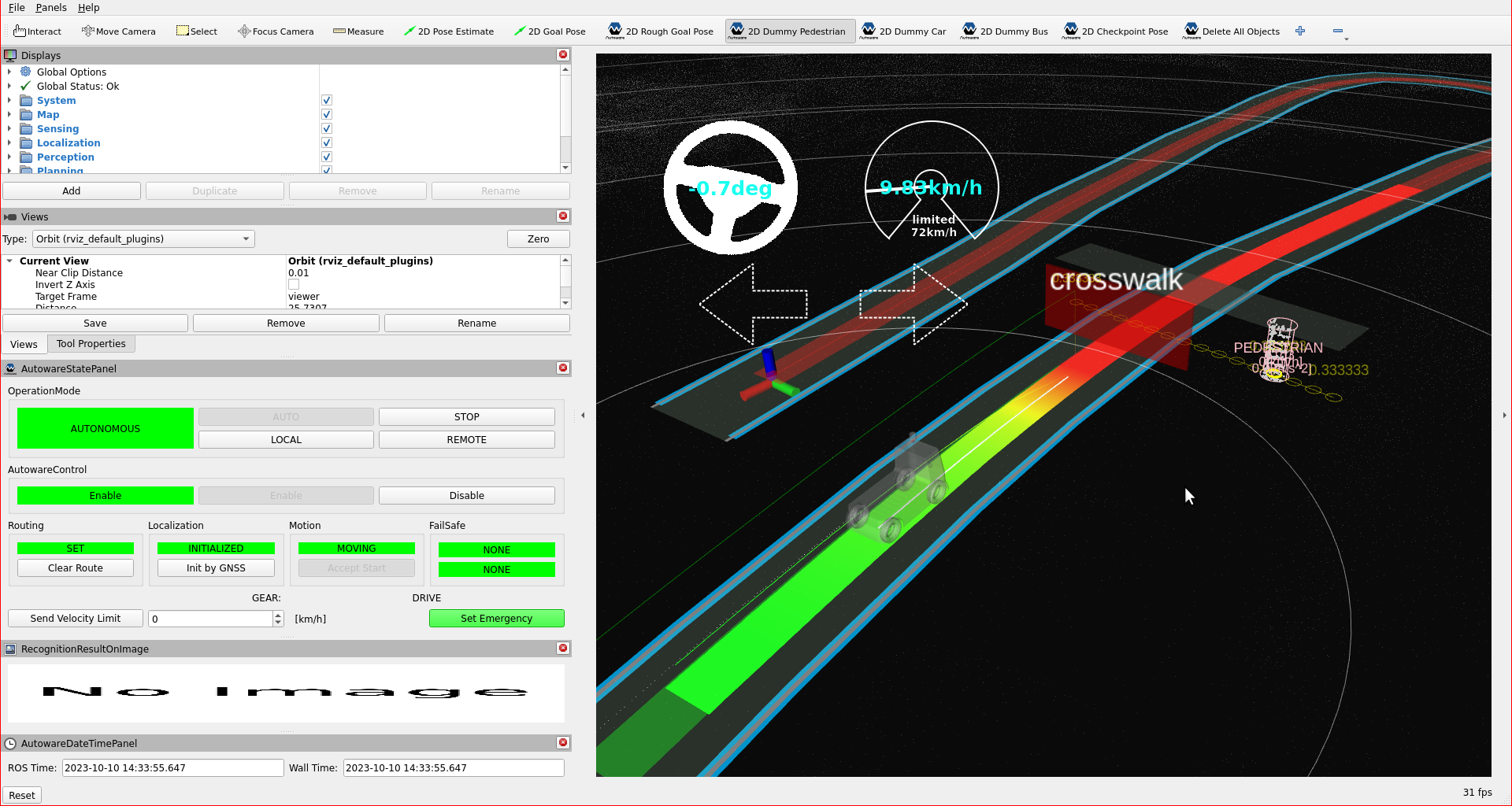
Crosswalk markers on rviz:
You can check your crosswalk elements in the planning simulator as this demonstration video: