Starting with TIER IV's CalibrationTools#
Overview#
Autoware expects to have multiple sensors attached to the vehicle as input to perception,
localization,
and planning stack.
These sensors must be calibrated correctly,
and their positions must be defined at sensor_kit_description and individual_params packages.
In this tutorial,
we will use TIER IV's CalibrationTools repository for the calibration.
Setting of sensor_kit_base_link position with respect to the base_link#
In previous section (creating the vehicle and sensor model),
we mentioned about sensors_calibration.yaml.
This file stores sensor_kit_base_link (child frame) position and orientation with respect to the
base_link (parent frame).
We need to update this relative position
(all values were initially set equal to zero when file is created)
with using CAD data of our vehicle.
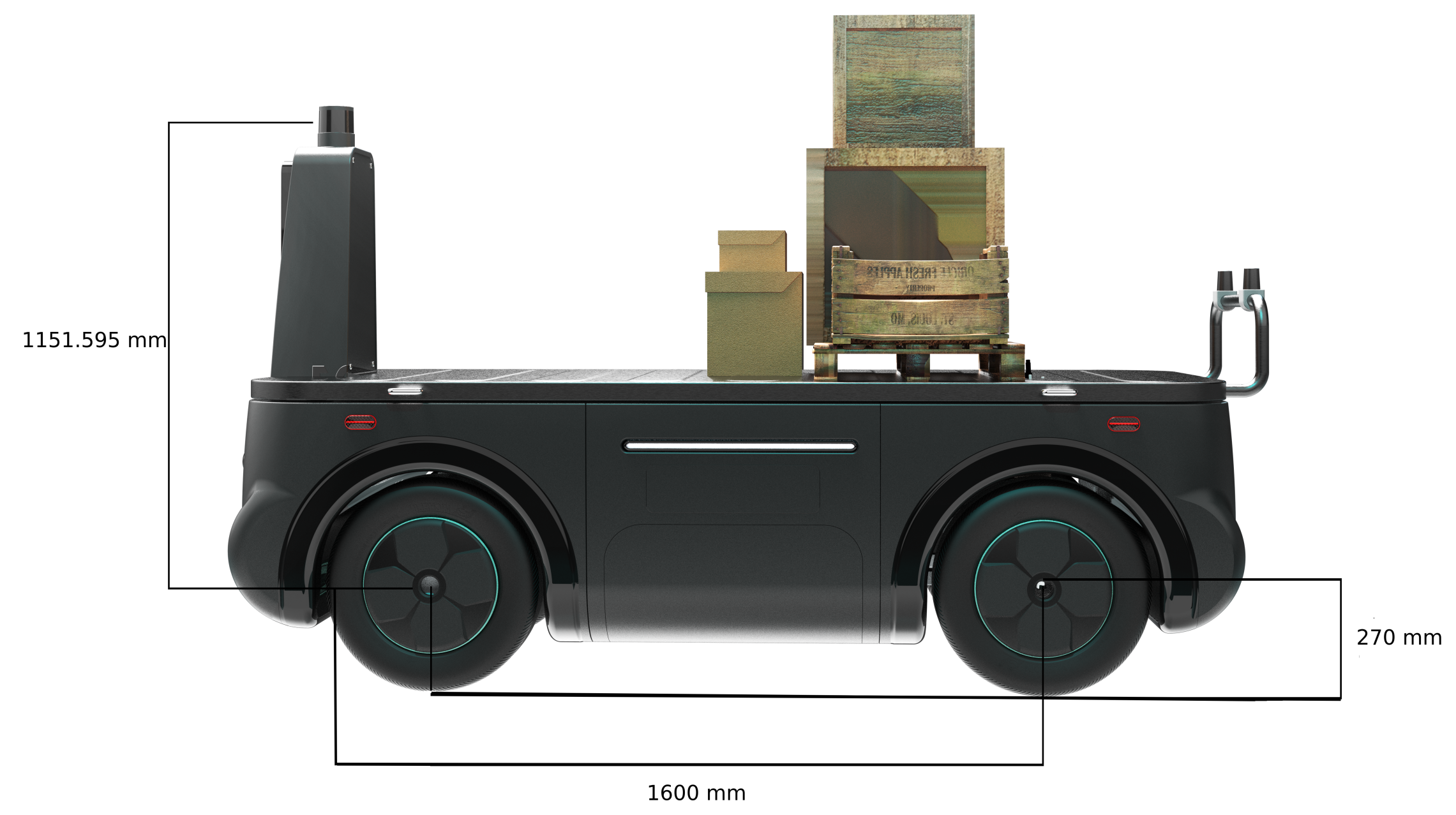
So, our sensors_calibration.yaml file for our tutorial_vehicle should be like this:
base_link:
sensor_kit_base_link:
x: 1.600000 # meter
y: 0.0
z: 1.421595 # 1.151595m + 0.270m
roll: 0.0
pitch: 0.0
yaw: 0.0
You need to update this transformation value with respect to the sensor_kit_base_link frame.
You can also use CAD values for GNSS/INS and IMU position in sensor_kit_calibration.yaml file.
(Please don't forget
to update the sensor_kit_calibration.yaml file in both the sensor_kit_launch and individual_params packages)
Installing TIER IV's CalibrationTools repositories on autoware#
After completing previous steps (creating your own autoware, creating a vehicle and sensor model etc.) we are ready to calibrate sensors which prepared their pipeline in creating the sensor model section.
Firstly, we will clone CalibrationTools repositories in own autoware.
cd <YOUR-OWN-AUTOWARE-DIRECTORY> # for example: cd autoware.tutorial_vehicle
wget https://raw.githubusercontent.com/tier4/CalibrationTools/tier4/universe/calibration_tools.repos
vcs import src < calibration_tools.repos
rosdep install -y --from-paths src --ignore-src --rosdistro $ROS_DISTRO
Then build the all packages after the all necessary changes are made on sensor model and vehicle model.
colcon build --symlink-install --cmake-args -DCMAKE_BUILD_TYPE=Release
Usage of CalibrationTools#
The CalibrationTools repository has several packages
for calibrating different sensor pairs such as lidar-lidar,
camera-lidar, ground-lidar etc. In order to calibrate our sensors,
we will modify extrinsic_calibration_package for our sensor kit.
For tutorial_vehicle, completed launch files when created following tutorial sections can be found here.