Creating Autoware repositories#
What is a Meta-repository?#
A meta-repository is a repository that manages multiple repositories,
and Autoware is one of them.
It serves as a centralized control point for referencing, configuring,
and versioning other repositories.
To accomplish this,
the Autoware meta-repository includes the autoware.repos file
for managing multiple repositories.
We will use the VCS tool
(Version Control System) to handle the .repos file.
VCS provides us with the capability to import, export, and pull from multiple repositories.
VCS will be used to import all the necessary repositories to build Autoware into our workspace.
Please refer to the documentation for VCS and .repos file usage.
How to create and customize your autoware meta-repository#
1. Create autoware meta-repository#
If you want to integrate Autoware into your vehicle, the first step is to create an Autoware meta-repository.
One easy way is to fork the Autoware repository and clone it. (For instructions on how to fork a repository, refer to GitHub Docs)
- In this guide, Autoware will be integrated into a
tutorial_vehicle(Note: when setting up multiple types of vehicles, adding a suffix likeautoware.vehicle_Aorautoware.vehicle_Bis recommended). For the first step, please visit the autoware repository and click the fork button. The fork process should look like this:
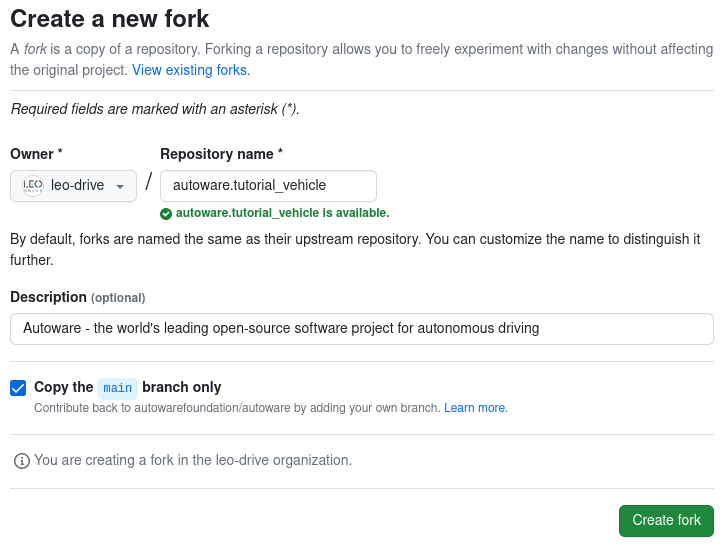
Then click "Create fork" button to continue. After that, we can clone our fork repository on our local system.
git clone https://github.com/YOUR_NAME/autoware.<YOUR-VEHICLE>.git
For example, it should be for our documentation:
git clone https://github.com/leo-drive/autoware.tutorial_vehicle.git
1.1 Create vehicle individual repositories#
To integrate Autoware into your individual vehicles, you need to fork and modify the following repositories as well:
- sample_sensor_kit: This repository will be used for sensing launch files, their pipelines-organizations and sensor descriptions.
Please fork and rename as autoware meta-repository. At this point, our forked repository name will be
tutorial_vehicle_sensor_kit_launch. - sample_vehicle_launch: This repository will be used for vehicle launch files, vehicle_descriptions and vehicle_model.
Please fork and rename this repository as well. At this point, our forked repository name will be
tutorial_vehicle_launch. - autoware_individual_params: This repository stores parameters that change depending on each vehicle (i.e. sensor calibrations). Please fork
and rename this repository as well; our forked repository name will be
tutorial_vehicle_individual_params. - autoware_launch:
This repository contains node configurations and their parameters for Autoware.
Please fork and rename it as the previously forked repositories;
our forked repository name will be
autoware_launch.tutorial_vehicle.
2. Customize autoware.repos for your environment#
You need to customize your autoware.repos to import your forked repositories.
The autoware.repos file usually includes information for all necessary Autoware repositories
(except calibration and simulator repositories).
Therefore, your forked repositories should also be added to this file.
2.1 Adding individual repos to autoware.repos#
After forking all repositories,
you can start
adding them to your Autoware meta-repository
by opening the autoware.repos file using any text editor and updating sample_sensor_kit_launch,
sample_vehicle_launch, autoware_individual_params
and autoware launch with your own individual repos.
For example, in this tutorial,
the necessary changes for our forked tutorial_vehicle repositories should be as follows:
-
Sensor Kit:
- sensor_kit/sample_sensor_kit_launch: - type: git - url: https://github.com/autowarefoundation/sample_sensor_kit_launch.git - version: main + sensor_kit/tutorial_vehicle_sensor_kit_launch: + type: git + url: https://github.com/leo-drive/tutorial_vehicle_sensor_kit_launch.git + version: main
-
Vehicle Launch:
- vehicle/sample_vehicle_launch: - type: git - url: https://github.com/autowarefoundation/sample_vehicle_launch.git - version: main + vehicle/tutorial_vehicle_launch: + type: git + url: https://github.com/leo-drive/tutorial_vehicle_launch.git + version: main
-
Individual Params:
- param/autoware_individual_params: - type: git - url: https://github.com/autowarefoundation/autoware_individual_params.git - version: main + param/tutorial_vehicle_individual_params: + type: git + url: https://github.com/leo-drive/tutorial_vehicle_individual_params.git + version: main
-
Autoware Launch:
- launcher/autoware_launch: - type: git - url: https://github.com/autowarefoundation/autoware_launch.git - version: main + launcher/autoware_launch.tutorial_vehicle: + type: git + url: https://github.com/leo-drive/autoware_launch.tutorial_vehicle.git + version: main
Please make similar changes to your own autoware.repos file. After making these changes, you will be ready to use VCS to import all the necessary repositories into your Autoware workspace.
First, create a src directory under your own Autoware meta-repository directory:
cd <YOUR-AUTOWARE-DIR>
mkdir src
Then, import all necessary repositories with vcs:
cd <YOUR-AUTOWARE-DIR>
vcs import src < autoware.repos
After the running vcs import command,
all autoware repositories will be cloned in the src folder under the Autoware directory.
Now, you can build your own repository with colcon build command:
cd <YOUR-AUTOWARE-DIR>
colcon build --symlink-install --cmake-args -DCMAKE_BUILD_TYPE=Release
Please refer to the following documentation links for instructions on how to create and customize each of your vehicle's packages:
- Creating vehicle and sensor models
- creating-vehicle-interface-package
- customizing-for-differential-drive-model
Please remember to add all your custom packages, such as interfaces and descriptions, to your autoware.repos to ensure that your packages are properly included and managed within the Autoware repository.