Manual calibration for all sensors#
Overview#
In this section, we will use Extrinsic Manual Calibration for extrinsic calibration of our sensors. After this process, we won't get accurate calibration results for final use, but we will have an initial calibration for other tools. For example, in the lidar-lidar or camera-lidar calibration phase, we will need initial calibration for getting accurate and successful calibration results.
We need a sample bag file for the calibration process which includes raw lidar topics and camera topics. The following shows an example of a bag file used for calibration:
ROS 2 Bag example of our calibration process
Files: rosbag2_2023_09_06-13_43_54_0.db3
Bag size: 18.3 GiB
Storage id: sqlite3
Duration: 169.12s
Start: Sep 6 2023 13:43:54.902 (1693997034.902)
End: Sep 6 2023 13:46:43.914 (1693997203.914)
Messages: 8504
Topic information: Topic: /sensing/lidar/top/pointcloud_raw | Type: sensor_msgs/msg/PointCloud2 | Count: 1691 | Serialization Format: cdr
Topic: /sensing/lidar/front/pointcloud_raw | Type: sensor_msgs/msg/PointCloud2 | Count: 1691 | Serialization Format: cdr
Topic: /sensing/camera/camera0/image_rect | Type: sensor_msgs/msg/Image | Count: 2561 | Serialization Format: cdr
Topic: /sensing/camera/camera0/camera_info | Type: sensor_msgs/msg/CameraInfo | Count: 2561 | Serialization Format: cdr
Extrinsic Manual-Based Calibration#
Creating launch files#
First of all, we will start with creating launch file for extrinsic_calibration_manager package:
cd <YOUR-OWN-AUTOWARE-DIRECTORY>/src/autoware/calibration_tools/sensor
cd extrinsic_calibration_manager/launch
mkdir <YOUR-OWN-SENSOR-KIT-NAME> # i.e. for our guide, it will ve mkdir tutorial_vehicle_sensor_kit
cd <YOUR-OWN-SENSOR-KIT-NAME> # i.e. for our guide, it will ve cd tutorial_vehicle_sensor_kit
touch manual.launch.xml manual_sensor_kit.launch.xml manual_sensors.launch.xml
We will be modifying these manual.launch.xml, manual_sensors.launch.xml and manual_sensor_kit.launch.xml by using TIER IV's sample sensor kit aip_x1.
So,
you should copy the contents of these three files from aip_x1 to your created files.
Modifying launch files according to your sensor kit#
So, we can start modifying manual.launch.xml,
please open this file on a text editor which will you prefer (code, gedit etc.).
(Optionally) Let's start with adding vehicle_id and sensor model names: (Values are not important. These parameters will be overridden by launch arguments)
<arg name="vehicle_id" default="default"/>
<let name="sensor_model" value="aip_x1"/>
+ <?xml version="1.0" encoding="UTF-8"?>
+ <launch>
- <arg name="vehicle_id" default="default"/>
+ <arg name="vehicle_id" default="<YOUR_VEHICLE_ID>"/>
+
- <arg name="sensor_model" default="aip_x1"/>
+ <let name="sensor_model" value="<YOUR_SENSOR_KIT_NAME>"/>
The final version of the file (manual.launch.xml) for tutorial_vehicle should be like this:
Sample manual.launch.xml file for tutorial vehicle
<?xml version="1.0" encoding="UTF-8"?>
<launch>
<arg name="vehicle_id" default="tutorial_vehicle"/>
<let name="sensor_model" value="tutorial_vehicle_sensor_kit"/>
<group>
<push-ros-namespace namespace="sensor_kit"/>
<include file="$(find-pkg-share extrinsic_calibration_manager)/launch/$(var sensor_model)/manual_sensor_kit.launch.xml">
<arg name="vehicle_id" value="$(var vehicle_id)"/>
</include>
</group>
<group>
<push-ros-namespace namespace="sensors"/>
<include file="$(find-pkg-share extrinsic_calibration_manager)/launch/$(var sensor_model)/manual_sensors.launch.xml">
<arg name="vehicle_id" value="$(var vehicle_id)"/>
</include>
</group>
</launch>
After the completing of manual.launch.xml file, we will be ready to implement manual_sensor_kit.launch.xml for the own sensor model's sensor_kit_calibration.yaml:
Optionally, you can modify sensor_model and vehicle_id over this xml snippet as well:
...
<arg name="vehicle_id" default="default"/>
<let name="sensor_model" value="aip_x1"/>
+ <?xml version="1.0" encoding="UTF-8"?>
+ <launch>
- <arg name="vehicle_id" default="default"/>
+ <arg name="vehicle_id" default="<YOUR_VEHICLE_ID>"/>
+
- <arg name="sensor_model" default="aip_x1"/>
+ <let name="sensor_model" value="<YOUR_SENSOR_KIT_NAME>"/>
...
Then, we will add all our sensor frames on extrinsic_calibration_manager as child frames:
<!-- extrinsic_calibration_manager -->
- <node pkg="extrinsic_calibration_manager" exec="extrinsic_calibration_manager" name="extrinsic_calibration_manager" output="screen">
- <param name="parent_frame" value="$(var parent_frame)"/>
- <param name="child_frames" value="
- [velodyne_top_base_link,
- livox_front_left_base_link,
- livox_front_center_base_link,
- livox_front_right_base_link]"/>
- </node>
+ <node pkg="extrinsic_calibration_manager" exec="extrinsic_calibration_manager" name="extrinsic_calibration_manager" output="screen">
+ <param name="parent_frame" value="$(var parent_frame)"/>
+ <!-- add your sensor frames here -->
+ <param name="child_frames" value="
+ [<YOUE_SENSOR_BASE_LINK>,
+ YOUE_SENSOR_BASE_LINK,
+ YOUE_SENSOR_BASE_LINK,
+ YOUE_SENSOR_BASE_LINK
+ ...]"/>
+ </node>
For tutorial_vehicle there are four sensors (two lidar, one camera, one gnss/ins), so it will be like this:
i.e extrinsic_calibration_manager child_frames for tutorial_vehicle
+ <!-- extrinsic_calibration_manager -->
+ <node pkg="extrinsic_calibration_manager" exec="extrinsic_calibration_manager" name="extrinsic_calibration_manager" output="screen">
+ <param name="parent_frame" value="$(var parent_frame)"/>
+ <!-- add your sensor frames here -->
+ <param name="child_frames" value="
+ [rs_helios_top_base_link,
+ rs_bpearl_front_base_link,
+ camera0/camera_link,
+ gnss_link]"/>
+ </node>
Lastly, we will launch a manual calibrator each frame for our sensors, please update namespace (ns) and child_frame argument on calibrator.launch.xml launch file argument:
- <include file="$(find-pkg-share extrinsic_manual_calibrator)/launch/calibrator.launch.xml">
- <arg name="ns" value="$(var parent_frame)/velodyne_top_base_link"/>
- <arg name="parent_frame" value="$(var parent_frame)"/>
- <arg name="child_frame" value="velodyne_top_base_link"/>
- </include>
+ <!-- extrinsic_manual_calibrator -->
+ <include file="$(find-pkg-share extrinsic_manual_calibrator)/launch/calibrator.launch.xml">
+ <arg name="ns" value="$(var parent_frame)/<YOUR_SENSOR_BASE_LINK>"/>
+ <arg name="parent_frame" value="$(var parent_frame)"/>
+ <arg name="child_frame" value="<YOUR_SENSOR_BASE_LINK>""/>
+ </include>
+
+ ...
+ ...
+ ...
+ ...
+ ...
+
i.e., calibrator.launch.xml for each tutorial_vehicle's sensor kit
+ <!-- extrinsic_manual_calibrator -->
+ <include file="$(find-pkg-share extrinsic_manual_calibrator)/launch/calibrator.launch.xml">
+ <arg name="ns" value="$(var parent_frame)/rs_helios_top_base_link"/>
+ <arg name="parent_frame" value="$(var parent_frame)"/>
+ <arg name="child_frame" value="rs_helios_top_base_link"/>
+ </include>
+
+ <include file="$(find-pkg-share extrinsic_manual_calibrator)/launch/calibrator.launch.xml">
+ <arg name="ns" value="$(var parent_frame)/rs_bpearl_front_base_link"/>
+ <arg name="parent_frame" value="$(var parent_frame)"/>
+ <arg name="child_frame" value="rs_bpearl_front_base_link"/>
+ </include>
+
+ <include file="$(find-pkg-share extrinsic_manual_calibrator)/launch/calibrator.launch.xml">
+ <arg name="ns" value="$(var parent_frame)/camera0/camera_link"/>
+ <arg name="parent_frame" value="$(var parent_frame)"/>
+ <arg name="child_frame" value="camera0/camera_link"/>
+ </include>
+
+ <include file="$(find-pkg-share extrinsic_manual_calibrator)/launch/calibrator.launch.xml">
+ <arg name="ns" value="$(var parent_frame)/gnss_link"/>
+ <arg name="parent_frame" value="$(var parent_frame)"/>
+ <arg name="child_frame" value="gnss_link"/>
+ </include>
+ </launch>
The final version of the manual_sensor_kit.launch.xml for tutorial_vehicle should be like this:
Sample manual_sensor_kit.launch.xml for tutorial_vehicle
<?xml version="1.0" encoding="UTF-8"?>
<launch>
<arg name="vehicle_id" default="tutorial_vehicle"/> <!-- You can update with your own vehicle_id -->
<let name="sensor_model" value="tutorial_vehicle_sensor_kit"/> <!-- You can update with your own sensor model -->
<let name="parent_frame" value="sensor_kit_base_link"/>
<!-- extrinsic_calibration_client -->
<arg name="src_yaml" default="$(find-pkg-share individual_params)/config/$(var vehicle_id)/$(var sensor_model)/sensor_kit_calibration.yaml"/>
<arg name="dst_yaml" default="$(env HOME)/sensor_kit_calibration.yaml"/>
<node pkg="extrinsic_calibration_client" exec="extrinsic_calibration_client" name="extrinsic_calibration_client" output="screen">
<param name="src_path" value="$(var src_yaml)"/>
<param name="dst_path" value="$(var dst_yaml)"/>
</node>
<!-- extrinsic_calibration_manager -->
<node pkg="extrinsic_calibration_manager" exec="extrinsic_calibration_manager" name="extrinsic_calibration_manager" output="screen">
<param name="parent_frame" value="$(var parent_frame)"/>
<!-- Please Update with your own sensor frames -->
<param name="child_frames" value="
[rs_helios_top_base_link,
rs_bpearl_front_base_link,
camera0/camera_link,
gnss_link]"/>
</node>
<!-- extrinsic_manual_calibrator -->
<!-- Please create a launch for all sensors that you used. -->
<include file="$(find-pkg-share extrinsic_manual_calibrator)/launch/calibrator.launch.xml">
<arg name="ns" value="$(var parent_frame)/rs_helios_top_base_link"/>
<arg name="parent_frame" value="$(var parent_frame)"/>
<arg name="child_frame" value="rs_helios_top_base_link"/>
</include>
<include file="$(find-pkg-share extrinsic_manual_calibrator)/launch/calibrator.launch.xml">
<arg name="ns" value="$(var parent_frame)/rs_bpearl_front_base_link"/>
<arg name="parent_frame" value="$(var parent_frame)"/>
<arg name="child_frame" value="rs_bpearl_front_base_link"/>
</include>
<include file="$(find-pkg-share extrinsic_manual_calibrator)/launch/calibrator.launch.xml">
<arg name="ns" value="$(var parent_frame)/camera0/camera_link"/>
<arg name="parent_frame" value="$(var parent_frame)"/>
<arg name="child_frame" value="camera0/camera_link"/>
</include>
<include file="$(find-pkg-share extrinsic_manual_calibrator)/launch/calibrator.launch.xml">
<arg name="ns" value="$(var parent_frame)/gnss_link"/>
<arg name="parent_frame" value="$(var parent_frame)"/>
<arg name="child_frame" value="gnss_link"/>
</include>
</launch>
You can update manual_sensors.launch.xml file according to your modified sensors_calibration.yaml file.
Since we will not be calibrating the sensor directly with respect to the base_link in tutorial_vehicle,
we will not change this file.
Calibrating sensors with extrinsic manual calibrator#
After the completion of manual.launch.xml and manual_sensor_kit.launch xml file for extrinsic_calibration_manager package, we need to build package:
colcon build --symlink-install --cmake-args -DCMAKE_BUILD_TYPE=Release --packages-select extrinsic_calibration_manager
So, we are ready to launch and use manual calibrator:
ros2 launch extrinsic_calibration_manager calibration.launch.xml mode:=manual sensor_model:=<OWN-SENSOR-KIT> vehicle_model:=<OWN-VEHICLE-MODEL> vehicle_id:=<VEHICLE-ID>
For tutorial vehicle:
ros2 launch extrinsic_calibration_manager calibration.launch.xml mode:=manual sensor_model:=tutorial_vehicle_sensor_kit vehicle_model:=tutorial_vehicle vehicle_id:=tutorial_vehicle
Then play ROS 2 bag file:
ros2 bag play <rosbag_path> --clock -l -r 0.2 \
--remap /tf:=/null/tf /tf_static:=/null/tf_static # if tf is recorded
You will show to a manual rqt_reconfigure window, we will update calibrations by hand according to the rviz2 results of sensors.
- Press
Refreshbutton then pressExpand Allbutton. The frames on tutorial_vehicle should like this:
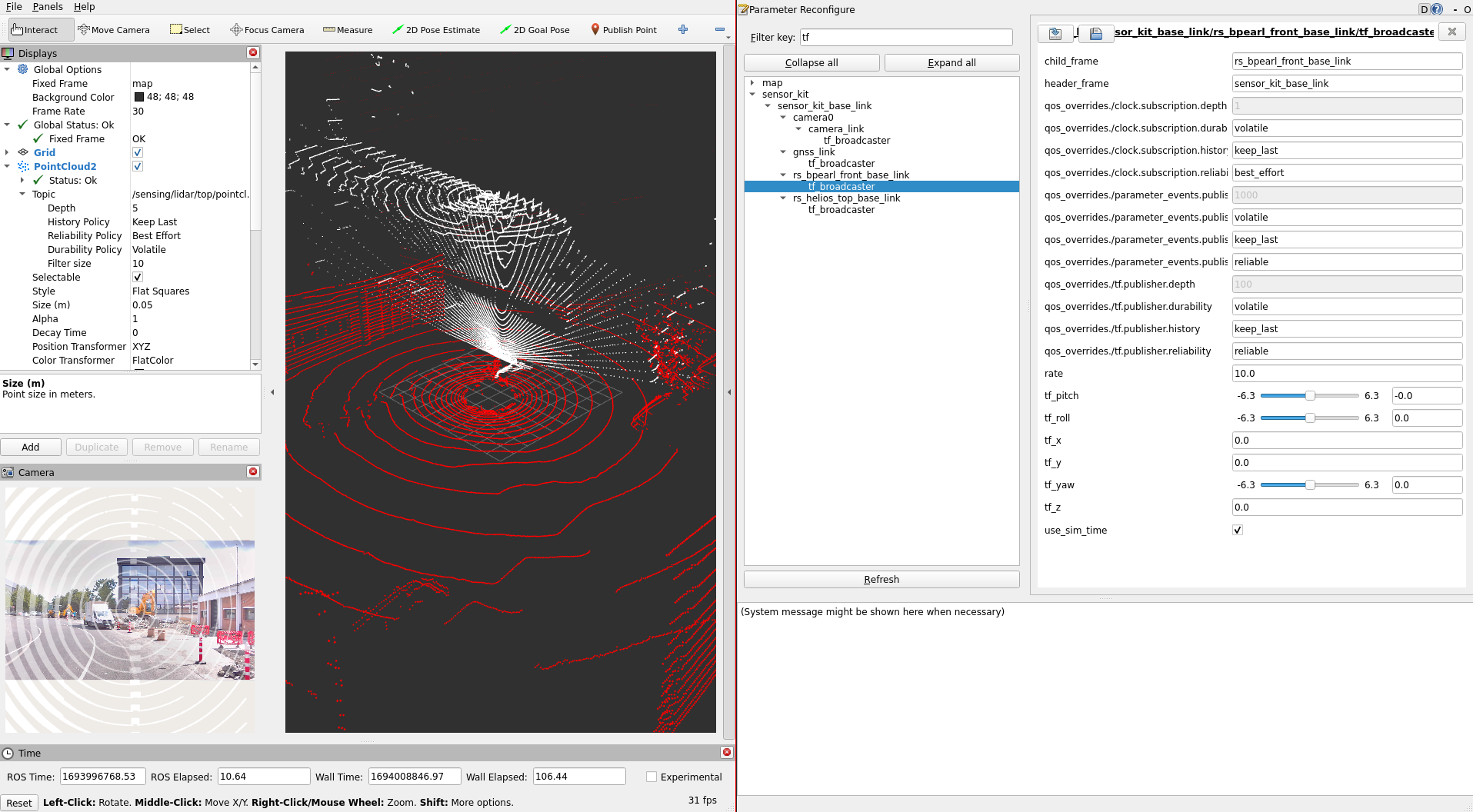
- Please write the target frame name in Filter area (i.e., front, helios etc.) and select tunable_static_tf_broadcaster_node, then you can adjust
tf_x, tf_y, tf_z, tf_roll, tf_pitch and tf_yawvalues over RQT panel. - If manual adjusting is finished, you can save your calibration results via this command:
ros2 topic pub /done std_msgs/Bool "data: true"
- Then you can check the output file in $HOME/*.yaml.
Warning
The initial calibration process can be important before the using other calibrations. We will look into the lidar-lidar calibration and camera-lidar calibration. At this point, there is hard to calibrate two sensors with exactly same frame, so you should find approximately (it not must be perfect) calibration pairs between sensors.
Here is the video for demonstrating a manual calibration process on tutorial_vehicle: