LeGO-LOAM-BOR#
What is LeGO-LOAM-BOR?#
- LeGO-LOAM-BOR is improved version of the LeGO-LOAM by improving quality of the code, making it more readable and consistent. Also, performance is improved by converting processes to multi-threaded approach.
Repository Information#
Original Repository link#
https://github.com/facontidavide/LeGO-LOAM-BOR
Required Sensors#
- LIDAR [VLP-16]
- IMU [9-AXIS]
ROS Compatibility#
- ROS 1
Dependencies#
- ROS Melodic ROS Installation
- PCL PCL Installation
- Gtsam GTSAM Installation
wget -O ~/Downloads/gtsam.zip https://github.com/borglab/gtsam/archive/4.0.0-alpha2.zip
cd ~/Downloads/ && unzip gtsam.zip -d ~/Downloads/
cd ~/Downloads/gtsam-4.0.0-alpha2/
mkdir build && cd build
cmake ..
sudo make install
Build & Run#
1) Build#
cd ~/catkin_ws/src
git clone https://github.com/facontidavide/LeGO-LOAM-BOR.git
cd ..
catkin_make
2) Set parameters#
- Set parameters on
LeGo-LOAM/loam_config.yaml
3) Run#
source devel/setup.bash
roslaunch lego_loam_bor run.launch rosbag:=/path/to/your/rosbag lidar_topic:=/velodyne_points
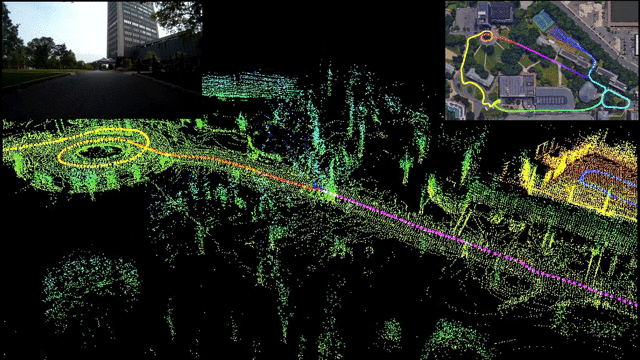
Example Result#


Cite LeGO-LOAM#
Thank you for citing our LeGO-LOAM paper if you use any of this code:
@inproceedings{legoloam2018,
title={LeGO-LOAM: Lightweight and Ground-Optimized Lidar Odometry and Mapping on Variable Terrain},
author={Tixiao Shan and Brendan Englot},
booktitle={IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
pages={4758-4765},
year={2018},
organization={IEEE}
}