Pointcloud map downsampling#
Overview#
When your created point cloud map is either too dense or too large (i.e., exceeding 300 MB), you may want to downsample it for improved computational and memory efficiency. Also, you can consider using dynamic map loading with partial loading, please check map_loader package for more information.
At tutorial_vehicle implementation we will use the whole map, so we will downsample it with using CloudCompare.
Installing CloudCompare#
You can install it by snap:
sudo snap install cloudcompare
Please check the official page for installing options.
Downsampling a pointcloud map#
There are three subsampling methods on CloudCompare,
we are using Space method for subsampling, but you can use other methods if you want.
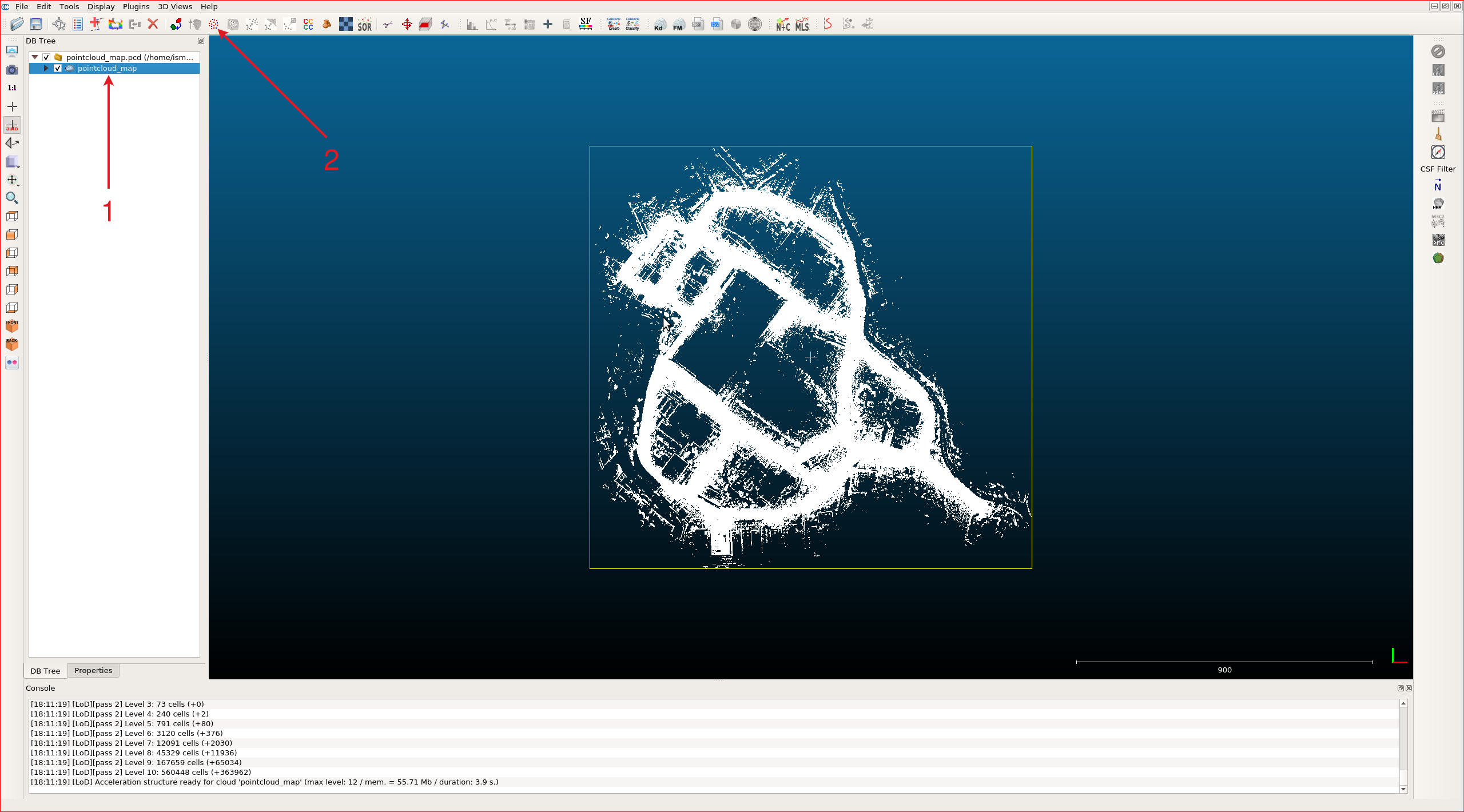
- Please open CloudCompare and drag your pointcloud to here, then you can select your pointcloud map by just clicking on the map at the DB tree panel.
- Then you can click
subsamplebutton on the top panel.
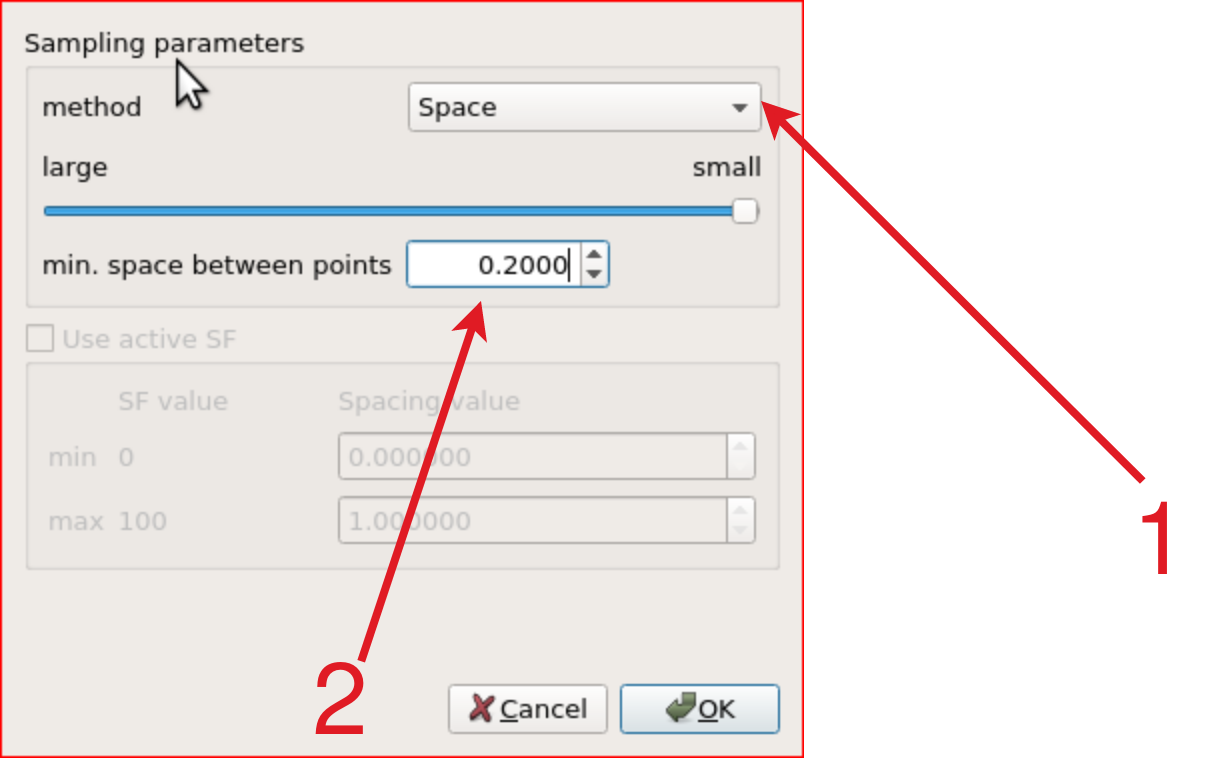
- Please select on your subsample method, we will use space for tutorial_vehicle.
- Then you can select options. For example, we need to determine minimum space between points. (Please be careful in this section, subsampling is depending on your map size, computer performance, etc.) We will set this value 0.2 for tutorial_vehicle's map.
- After the subsampling process is finished, you should select pointcloud on the DB Tree panel as well.
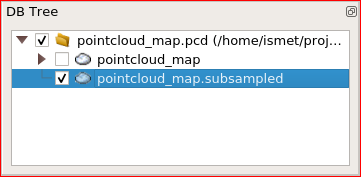
Now,
you can save your downsampled pointcloud with ctrl + s
or you can click save button from File bar.
Then, this pointcloud can be used by autoware.