SC-LeGO-LOAM#
What is SC-LeGO-LOAM?#
- SC-LeGO-LOAM integrated LeGO-LOAM for lidar odometry and 2 different loop closure methods: ScanContext and Radius search based loop closure. While ScanContext is correcting large drifts, radius search based method is good for fine-stitching.
Repository Information#
Original Repository link#
https://github.com/irapkaist/SC-LeGO-LOAM
Required Sensors#
- LIDAR [VLP-16, HDL-32E, VLS-128, Ouster OS1-16, Ouster OS1-64]
- IMU [9-AXIS]
ROS Compatibility#
- ROS 1
Dependencies#
- ROS
- PCL
- GTSAM
wget -O ~/Downloads/gtsam.zip https://github.com/borglab/gtsam/archive/4.0.0-alpha2.zip
cd ~/Downloads/ && unzip gtsam.zip -d ~/Downloads/
cd ~/Downloads/gtsam-4.0.0-alpha2/
mkdir build && cd build
cmake ..
sudo make install
Build & Run#
1) Build#
cd ~/catkin_ws/src
git clone https://github.com/irapkaist/SC-LeGO-LOAM.git
cd ..
catkin_make
2) Set parameters#
- Set imu and lidar topic on
include/utility.h - Set lidar properties on
include/utility.h - Set scan context settings on
include/Scancontext.h
(Do not forget to rebuild after setting parameters.)
3) Run#
source devel/setup.bash
roslaunch lego_loam run.launch
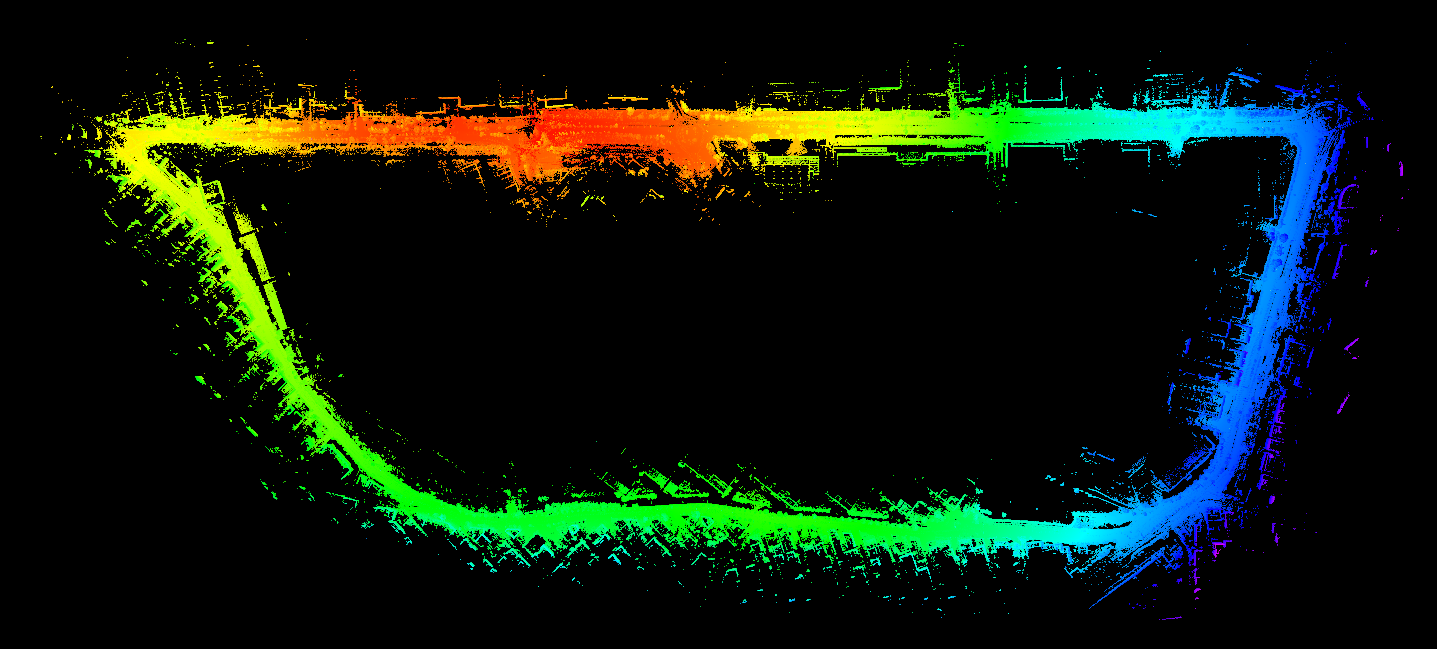
Example Result#
Other Examples#
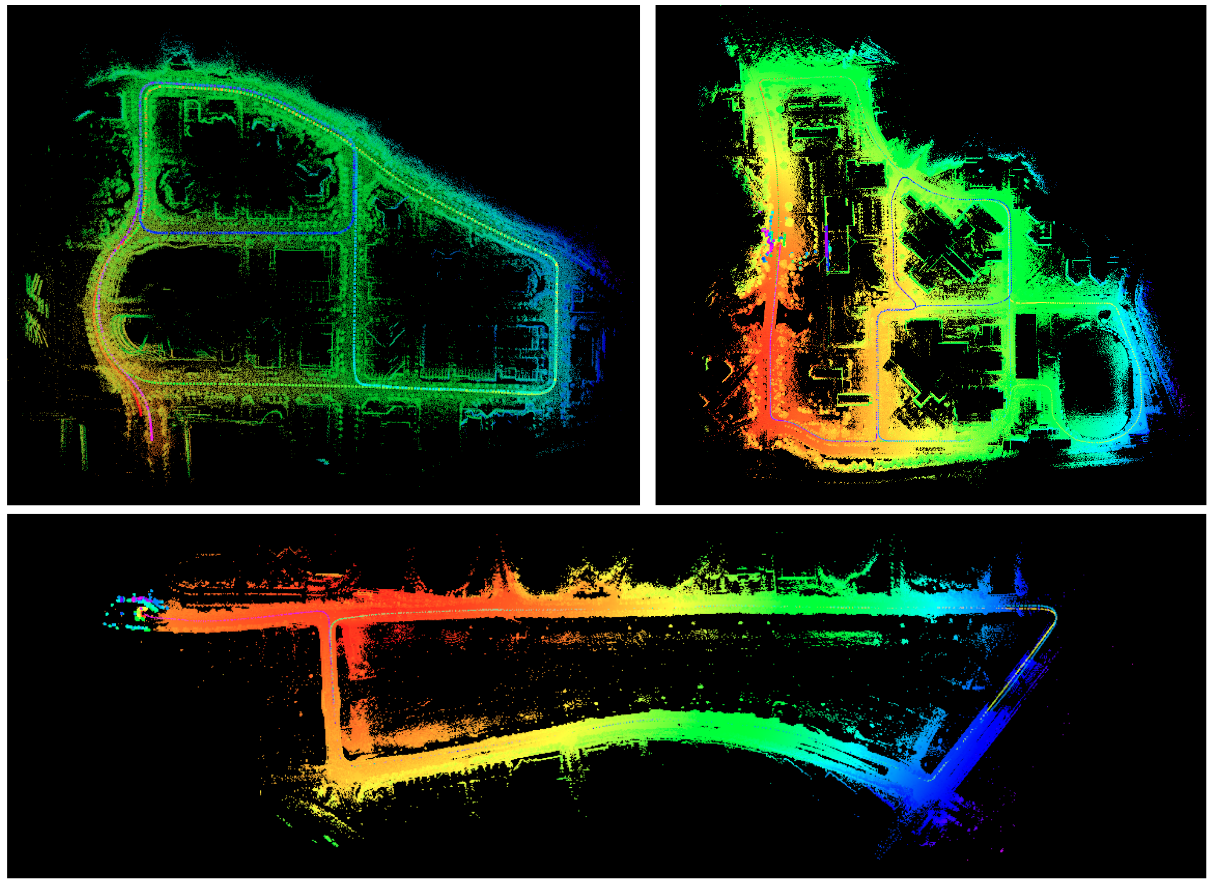
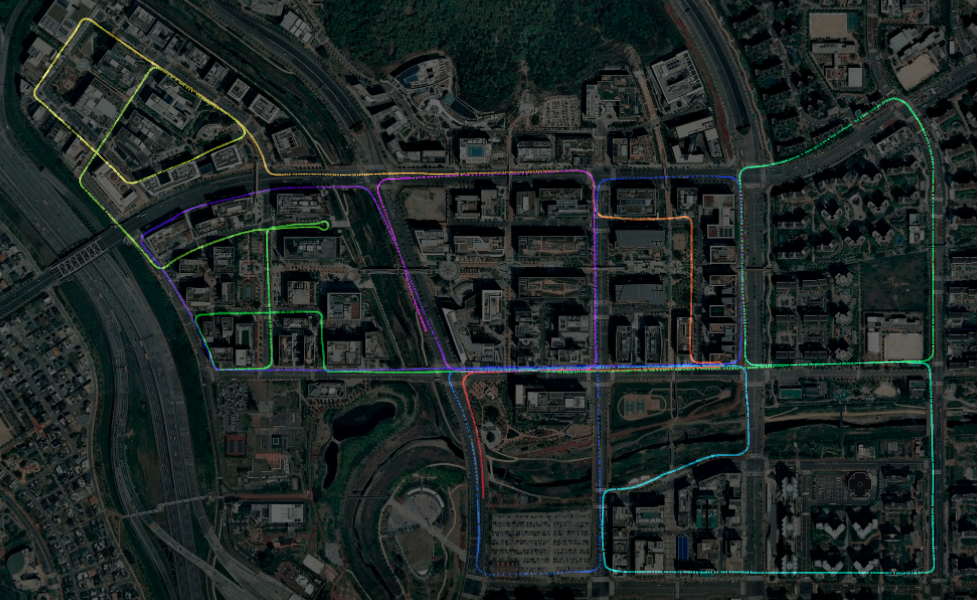
MulRan dataset#
- If you want to reproduce the results as the above video, you can download the MulRan dataset and use the ROS topic publishing tool .
Cite SC-LeGO-LOAM#
@INPROCEEDINGS { gkim-2018-iros,
author = {Kim, Giseop and Kim, Ayoung},
title = { Scan Context: Egocentric Spatial Descriptor for Place Recognition within {3D} Point Cloud Map },
booktitle = { Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems },
year = { 2018 },
month = { Oct. },
address = { Madrid }
}
and
@inproceedings{legoloam2018,
title={LeGO-LOAM: Lightweight and Ground-Optimized Lidar Odometry and Mapping on Variable Terrain},
author={Shan, Tixiao and Englot, Brendan},
booktitle={IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
pages={4758-4765},
year={2018},
organization={IEEE}
}
Contact#
- Maintainer: Giseop Kim (
paulgkim@kaist.ac.kr)