tier4_planning_rviz_plugin
This package is including jsk code.
Note that jsk_overlay_utils.cpp and jsk_overlay_utils.hpp are BSD license.
Purpose
This plugin displays the path, trajectory, and maximum speed.
| Name |
Type |
Description |
/input/path |
autoware_auto_planning_msgs::msg::Path |
The topic on which to subscribe path |
/input/trajectory |
autoware_auto_planning_msgs::msg::Trajectory |
The topic on which to subscribe trajectory |
/planning/scenario_planning/current_max_velocity |
tier4_planning_msgs/msg/VelocityLimit |
The topic on which to publish max velocity |
Output
| Name |
Type |
Description |
/planning/mission_planning/checkpoint |
geometry_msgs/msg/PoseStamped |
The topic on which to publish checkpoint |
Parameter
Core Parameters
MissionCheckpoint
| Name |
Type |
Default Value |
Description |
pose_topic_property_ |
string |
mission_checkpoint |
The topic on which to publish checkpoint |
std_dev_x_ |
float |
0.5 |
X standard deviation for checkpoint pose [m] |
std_dev_y_ |
float |
0.5 |
Y standard deviation for checkpoint pose [m] |
std_dev_theta_ |
float |
M_PI / 12.0 |
Theta standard deviation for checkpoint pose [rad] |
position_z_ |
float |
0.0 |
Z position for checkpoint pose [m] |
Path
| Name |
Type |
Default Value |
Description |
property_path_view_ |
bool |
true |
Use Path property or not |
property_path_width_view_ |
bool |
false |
Use Constant Width or not |
property_path_width_ |
float |
2.0 |
Width of Path property [m] |
property_path_alpha_ |
float |
1.0 |
Alpha of Path property |
property_path_color_view_ |
bool |
false |
Use Constant Color or not |
property_path_color_ |
QColor |
Qt::black |
Color of Path property |
property_velocity_view_ |
bool |
true |
Use Velocity property or not |
property_velocity_alpha_ |
float |
1.0 |
Alpha of Velocity property |
property_velocity_scale_ |
float |
0.3 |
Scale of Velocity property |
property_velocity_color_view_ |
bool |
false |
Use Constant Color or not |
property_velocity_color_ |
QColor |
Qt::black |
Color of Velocity property |
property_vel_max_ |
float |
3.0 |
Max velocity [m/s] |
DrivableArea
| Name |
Type |
Default Value |
Description |
color_scheme_property_ |
int |
0 |
Color scheme of DrivableArea property |
alpha_property_ |
float |
0.2 |
Alpha of DrivableArea property |
draw_under_property_ |
bool |
false |
Draw as background or not |
| Name |
Type |
Default Value |
Description |
property_path_footprint_view_ |
bool |
true |
Use Path Footprint property or not |
property_path_footprint_alpha_ |
float |
1.0 |
Alpha of Path Footprint property |
property_path_footprint_color_ |
QColor |
Qt::black |
Color of Path Footprint property |
property_vehicle_length_ |
float |
4.77 |
Vehicle length [m] |
property_vehicle_width_ |
float |
1.83 |
Vehicle width [m] |
property_rear_overhang_ |
float |
1.03 |
Rear overhang [m] |
Trajectory
| Name |
Type |
Default Value |
Description |
property_path_view_ |
bool |
true |
Use Path property or not |
property_path_width_ |
float |
2.0 |
Width of Path property [m] |
property_path_alpha_ |
float |
1.0 |
Alpha of Path property |
property_path_color_view_ |
bool |
false |
Use Constant Color or not |
property_path_color_ |
QColor |
Qt::black |
Color of Path property |
property_velocity_view_ |
bool |
true |
Use Velocity property or not |
property_velocity_alpha_ |
float |
1.0 |
Alpha of Velocity property |
property_velocity_scale_ |
float |
0.3 |
Scale of Velocity property |
property_velocity_color_view_ |
bool |
false |
Use Constant Color or not |
property_velocity_color_ |
QColor |
Qt::black |
Color of Velocity property |
property_velocity_text_view_ |
bool |
false |
View text Velocity |
property_velocity_text_scale_ |
float |
0.3 |
Scale of Velocity property |
property_vel_max_ |
float |
3.0 |
Max velocity [m/s] |
| Name |
Type |
Default Value |
Description |
property_trajectory_footprint_view_ |
bool |
true |
Use Trajectory Footprint property or not |
property_trajectory_footprint_alpha_ |
float |
1.0 |
Alpha of Trajectory Footprint property |
property_trajectory_footprint_color_ |
QColor |
QColor(230, 230, 50) |
Color of Trajectory Footprint property |
property_vehicle_length_ |
float |
4.77 |
Vehicle length [m] |
property_vehicle_width_ |
float |
1.83 |
Vehicle width [m] |
property_rear_overhang_ |
float |
1.03 |
Rear overhang [m] |
property_trajectory_point_view_ |
bool |
false |
Use Trajectory Point property or not |
property_trajectory_point_alpha_ |
float |
1.0 |
Alpha of Trajectory Point property |
property_trajectory_point_color_ |
QColor |
QColor(0, 60, 255) |
Color of Trajectory Point property |
property_trajectory_point_radius_ |
float |
0.1 |
Radius of Trajectory Point property |
MaxVelocity
| Name |
Type |
Default Value |
Description |
property_topic_name_ |
string |
/planning/scenario_planning/current_max_velocity |
The topic on which to subscribe max velocity |
property_text_color_ |
QColor |
QColor(255, 255, 255) |
Text color |
property_left_ |
int |
128 |
Left of the plotter window [px] |
property_top_ |
int |
128 |
Top of the plotter window [px] |
property_length_ |
int |
96 |
Length of the plotter window [px] |
property_value_scale_ |
float |
1.0 / 4.0 |
Value scale |
Usage
- Start rviz and select Add under the Displays panel.
- Select any one of the tier4_planning_rviz_plugin and press OK.
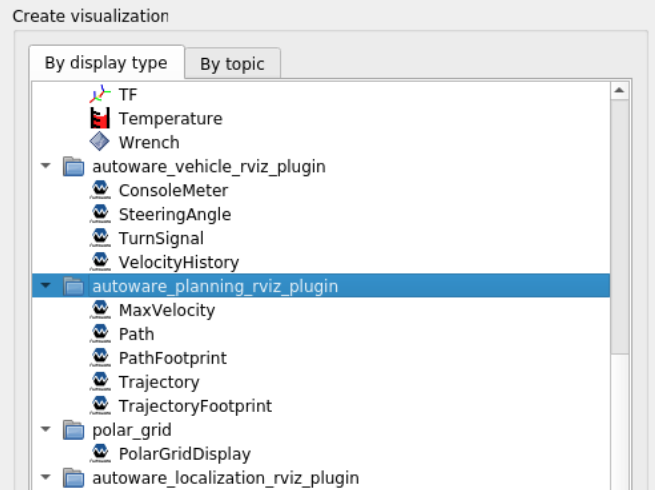
- Enter the name of the topic where you want to view the path or trajectory.

Material Design Icons
This project uses Material Design Icons by Google. These icons are used under the terms of the Apache License, Version 2.0.
Material Design Icons are a collection of symbols provided by Google that are used to enhance the user interface of applications, websites, and other digital products.
License
The Material Design Icons are licensed under the Apache License, Version 2.0. You may obtain a copy of the License at:
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the specific language governing permissions and limitations under the License.
Acknowledgments
We would like to express our gratitude to Google for making these icons available to the community, helping developers and designers enhance the visual appeal and user experience of their projects.