distortion_corrector#
Purpose#
The distortion_corrector is a node that compensates pointcloud distortion caused by ego vehicle's movement during 1 scan.
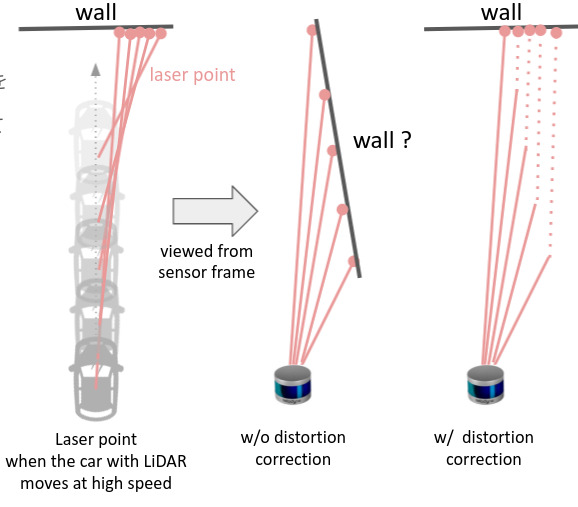
Since the LiDAR sensor scans by rotating an internal laser, the resulting point cloud will be distorted if the ego-vehicle moves during a single scan (as shown by the figure below). The node corrects this by interpolating sensor data using odometry of ego-vehicle.
Inner-workings / Algorithms#
- Use the equations below (specific to the Velodyne 32C sensor) to obtain an accurate timestamp for each scan data point.
- Use twist information to determine the distance the ego-vehicle has traveled between the time that the scan started and the corrected timestamp of each point, and then correct the position of the point.
The offset equation is given by $ TimeOffset = (55.296 \mu s SequenceIndex) + (2.304 \mu s DataPointIndex) $
To calculate the exact point time, add the TimeOffset to the timestamp. $ ExactPointTime = TimeStamp + TimeOffset $
Inputs / Outputs#
Input#
| Name | Type | Description |
|---|---|---|
~/input/points |
sensor_msgs::msg::PointCloud2 |
reference points |
~/input/twist |
geometry_msgs::msg::TwistWithCovarianceStamped |
twist |
~/input/imu |
sensor_msgs::msg::Imu |
imu data |
Output#
| Name | Type | Description |
|---|---|---|
~/output/points |
sensor_msgs::msg::PointCloud2 |
filtered points |
Parameters#
Core Parameters#
| Name | Type | Default Value | Description |
|---|---|---|---|
timestamp_field_name |
string | "time_stamp" | time stamp field name |
use_imu |
bool | true | use gyroscope for yaw rate if true, else use vehicle status |