radar_crossing_objects_noise_filter#
This package contains a radar noise filter module for autoware_auto_perception_msgs/msg/DetectedObject. This package can filter the noise objects which cross to the ego vehicle.
Design#
Background#
This package aim to filter the noise objects which cross from the ego vehicle. The reason why these objects are noise is as below.
-
- The objects with doppler velocity can be trusted more than those with vertical velocity to it.
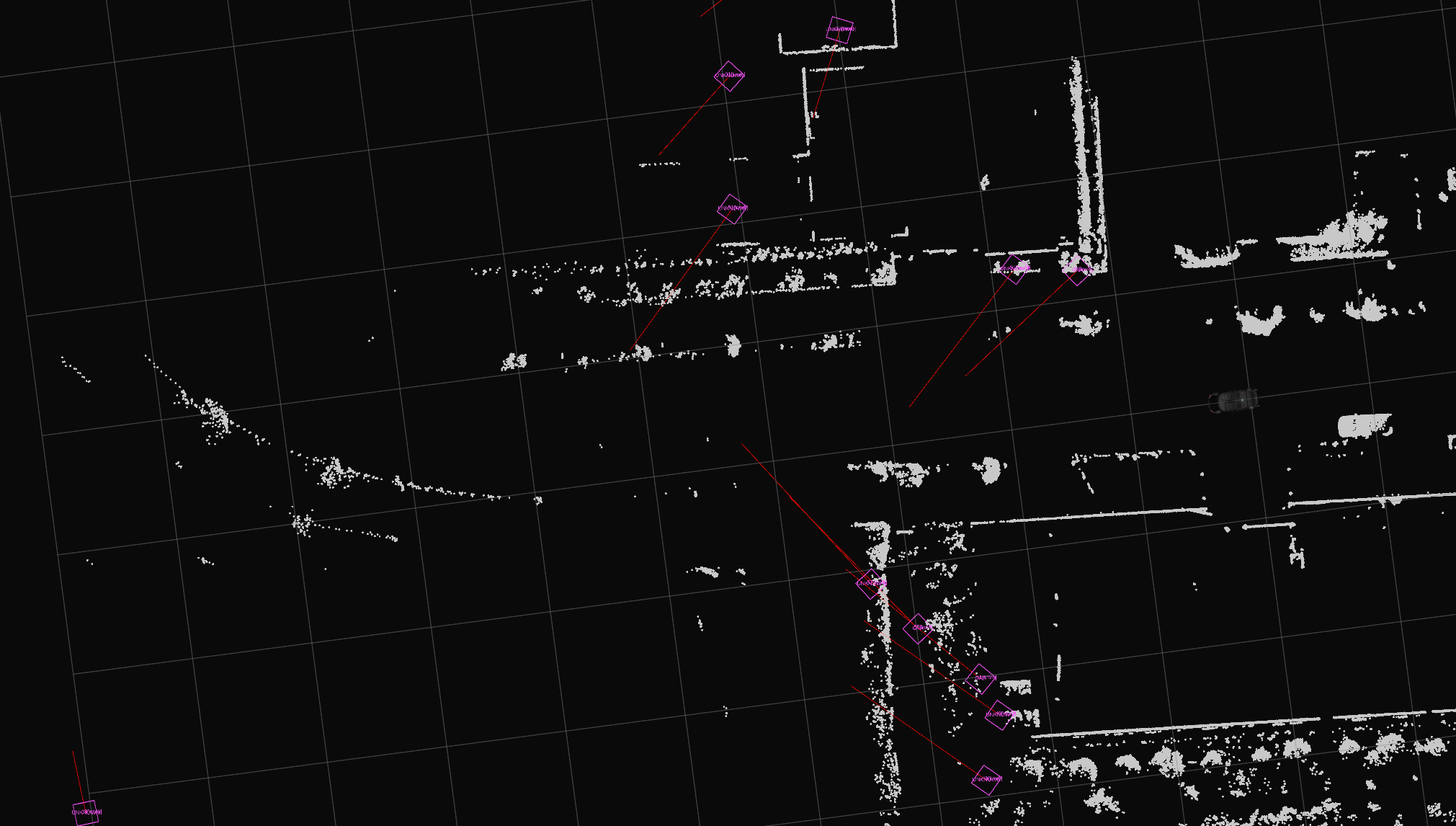
Radars can get velocity information of objects as doppler velocity, but cannot get vertical velocity to doppler velocity directory. Some radars can output the objects with not only doppler velocity but also vertical velocity by estimation. If the vertical velocity estimation is poor, it leads to output noise objects. In other words, the above situation is that the objects which has vertical twist viewed from ego vehicle can tend to be noise objects.
The example is below figure. Velocity estimation fails on static objects, resulting in ghost objects crossing in front of ego vehicles.
-
- Turning around by ego vehicle affect the output from radar.
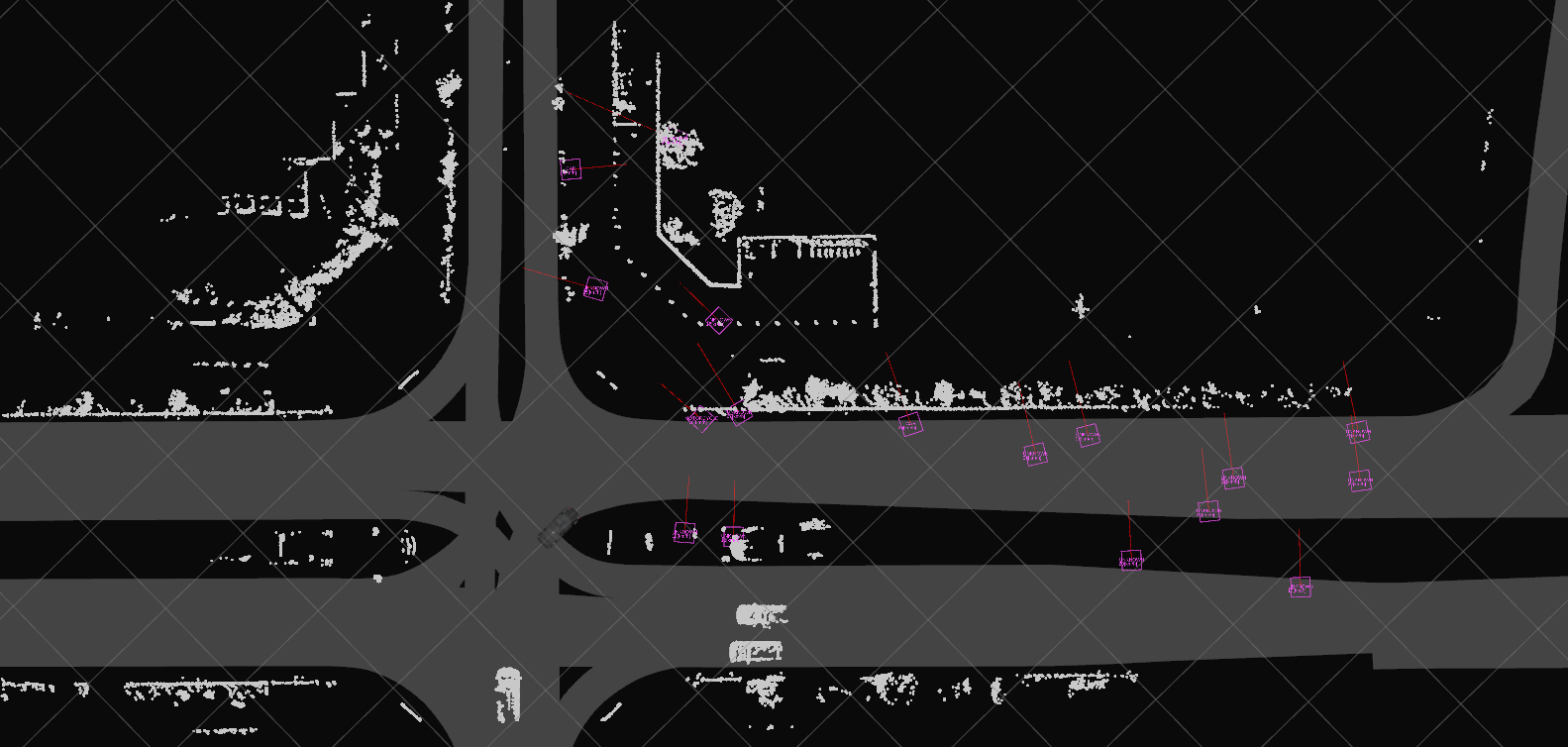
When the ego vehicle turns around, the radars outputting at the object level sometimes fail to estimate the twist of objects correctly even if radar_tracks_msgs_converter compensates by the ego vehicle twist. So if an object detected by radars has circular motion viewing from base_link, it is likely that the speed is estimated incorrectly and that the object is a static object.
The example is below figure. When the ego vehicle turn right, the surrounding objects have left circular motion.
Algorithm#
To filter the objects crossing to ego vehicle, this package filter the objects as below algorithm.

// If velocity of an object is rather than the velocity_threshold,
// and crossing_yaw is near to vertical
// angle_threshold < crossing_yaw < pi - angle_threshold
if (
velocity > node_param_.velocity_threshold &&
abs(std::cos(crossing_yaw)) < abs(std::cos(node_param_.angle_threshold))) {
// Object is noise object;
} else {
// Object is not noise object;
}
Interface#
Input#
~/input/objects(autoware_auto_perception_msgs/msg/DetectedObjects.msg)- Input radar objects
Output#
~/output/noise_objects(autoware_auto_perception_msgs/msg/DetectedObjects.msg)- Noise objects
~/output/filtered_objects(autoware_auto_perception_msgs/msg/DetectedObjects.msg)- Filtered objects
Parameters#
angle_threshold(double) [rad]- Default parameter is 1.0472.
This parameter is the angle threshold to filter. It has condition that 0 < angle_threshold < pi / 2. If the crossing angle is larger than this parameter, it can be a candidate for noise object. In other words, if it is smaller than this parameter, it is a filtered object.
If this parameter is set smaller, more objects are considered noise. In detail, see algorithm chapter.
velocity_threshold(double) [m/s]- Default parameter is 3.0.
This parameter is the velocity threshold to filter. If velocity of an object is larger than this parameter, it can be a candidate for noise object. In other words, if velocity of an object is smaller than this parameter, it is a filtered object. If this parameter is set smaller, more objects are considered noise. In detail, see algorithm chapter.