raw_vehicle_cmd_converter#
Overview#
The raw_vehicle_command_converter is a crucial node in vehicle automation systems, responsible for translating desired steering and acceleration inputs into specific vehicle control commands. This process is achieved through a combination of a lookup table and an optional feedback control system.
Lookup Table#
The core of the converter's functionality lies in its use of a CSV-formatted lookup table. This table encapsulates the relationship between the throttle/brake pedal (depending on your vehicle control interface) and the corresponding vehicle acceleration across various speeds. The converter utilizes this data to accurately translate target accelerations into appropriate throttle/brake values.
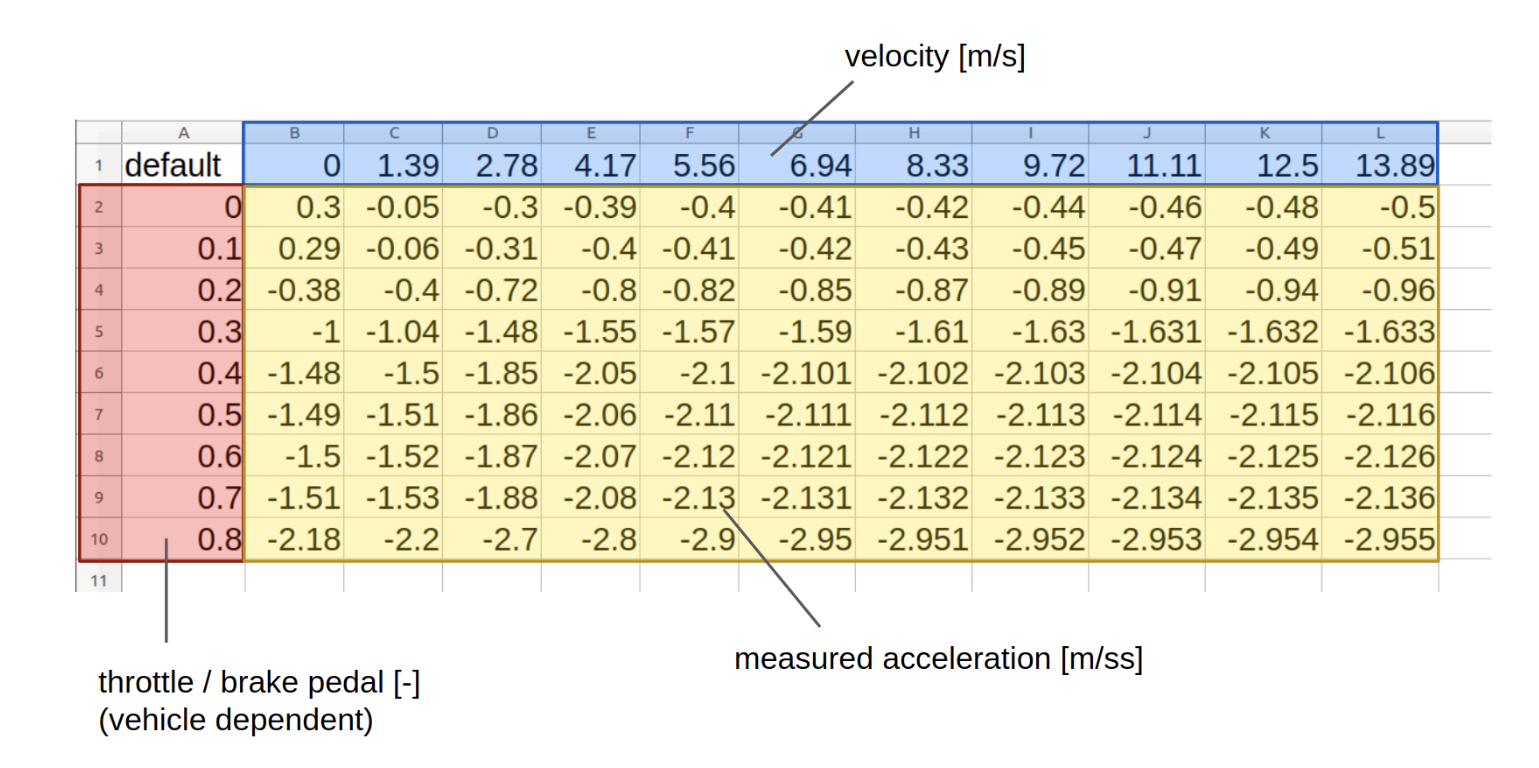
Creation of Reference Data#
Reference data for the lookup table is generated through the following steps:
- Data Collection: On a flat road, a constant value command (e.g., throttle/brake pedal) is applied to accelerate or decelerate the vehicle.
- Recording Data: During this phase, both the IMU acceleration and vehicle velocity data are recorded.
- CSV File Generation: A CSV file is created, detailing the relationship between command values, vehicle speed, and resulting acceleration.
Once the acceleration map is crafted, it should be loaded when the RawVehicleCmdConverter node is launched, with the file path defined in the launch file.
Auto-Calibration Tool#
For ease of calibration and adjustments to the lookup table, an auto-calibration tool is available. More information and instructions for this tool can be found here.
Input topics#
| Name | Type | Description |
|---|---|---|
~/input/control_cmd |
autoware_auto_control_msgs::msg::AckermannControlCommand | target velocity/acceleration/steering_angle/steering_angle_velocity is necessary to calculate actuation command. |
~/input/steering" |
autoware_auto_vehicle_msgs::SteeringReport | current status of steering used for steering feed back control |
~/input/twist |
navigation_msgs::Odometry | twist topic in odometry is used. |
Output topics#
| Name | Type | Description |
|---|---|---|
~/output/actuation_cmd |
tier4_vehicle_msgs::msg::ActuationCommandStamped | actuation command for vehicle to apply mechanical input |
Parameters#
| Name | Type | Description | Default | Range |
|---|---|---|---|---|
| csv_path_accel_map | string | path for acceleration map csv file | $(find-pkg-share raw_vehicle_cmd_converter)/data/default/accel_map.csv | N/A |
| csv_path_brake_map | string | path for brake map csv file | $(find-pkg-share raw_vehicle_cmd_converter)/data/default/brake_map.csv | N/A |
| csv_path_steer_map | string | path for steer map csv file | $(find-pkg-share raw_vehicle_cmd_converter)/data/default/steer_map.csv | N/A |
| convert_accel_cmd | boolean | use accel or not | true | N/A |
| convert_brake_cmd | boolean | use brake or not | true | N/A |
| convert_steer_cmd | boolean | use steer or not | true | N/A |
| use_steer_ff | boolean | steering steer controller using steer feed forward or not | true | N/A |
| use_steer_fb | boolean | steering steer controller using steer feed back or not | true | N/A |
| is_debugging | boolean | debugging mode or not | false | N/A |
| max_throttle | float | maximum value of throttle | 0.4 | ≥0.0 |
| max_brake | float | maximum value of brake | 0.8 | ≥0.0 |
| max_steer | float | maximum value of steer | 10.0 | N/A |
| min_steer | float | minimum value of steer | -10.0 | N/A |
| steer_pid.kp | float | proportional coefficient value in PID control | 150.0 | N/A |
| steer_pid.ki | float | integral coefficient value in PID control | 15.0 | >0.0 |
| steer_pid.kd | float | derivative coefficient value in PID control | 0.0 | N/A |
| steer_pid.max | float | maximum value of PID | 8.0 | N/A |
| steer_pid.min | float | minimum value of PID | -8.0. | N/A |
| steer_pid.max_p | float | maximum value of Proportional in PID | 8.0 | N/A |
| steer_pid.min_p | float | minimum value of Proportional in PID | -8.0 | N/A |
| steer_pid.max_i | float | maximum value of Integral in PID | 8.0 | N/A |
| steer_pid.min_i | float | minimum value of Integral in PID | -8.0 | N/A |
| steer_pid.max_d | float | maximum value of Derivative in PID | 0.0 | N/A |
| steer_pid.min_d | float | minimum value of Derivative in PID | 0.0 | N/A |
| steer_pid.invalid_integration_decay | float | invalid integration decay value in PID control | 0.97 | >0.0 |
Limitation#
The current feed back implementation is only applied to steering control.