steer_offset_estimator#
Purpose#
The role of this node is to automatically calibrate steer_offset used in the vehicle_interface node.
The base steer offset value is 0 by default, which is standard, is updated iteratively with the loaded driving data. This module is supposed to be used in below straight driving situation.
Inner-workings / Algorithms#
Estimates sequential steering offsets from kinematic model and state observations.
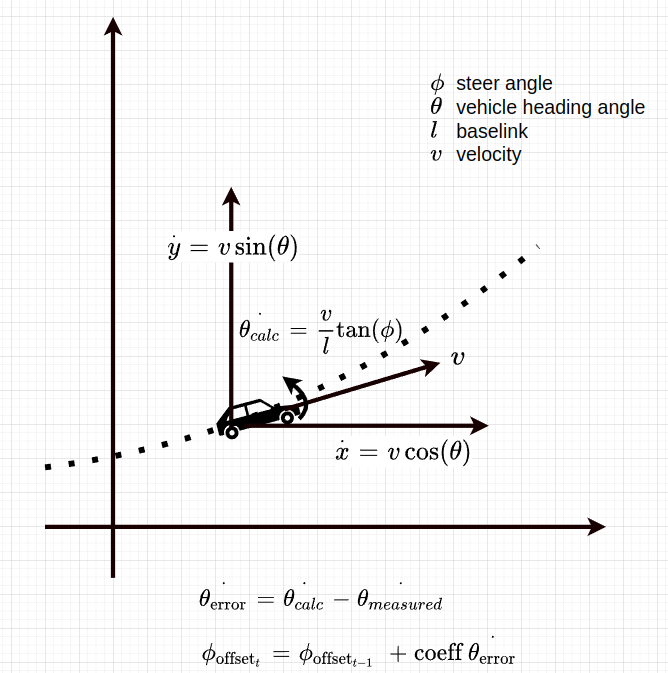 Calculate yaw rate error and then calculate steering error recursively by least squared method, for more details see
Calculate yaw rate error and then calculate steering error recursively by least squared method, for more details see updateSteeringOffset() function.
Inputs / Outputs#
Input#
| Name | Type | Description |
|---|---|---|
~/input/twist |
geometry_msgs::msg::TwistStamped |
vehicle twist |
~/input/steer |
autoware_auto_vehicle_msgs::msg::SteeringReport |
steering |
Output#
| Name | Type | Description |
|---|---|---|
~/output/steering_offset |
tier4_debug_msgs::msg::Float32Stamped |
steering offset |
~/output/steering_offset_covariance |
tier4_debug_msgs::msg::Float32Stamped |
covariance of steering offset |
Launch Calibrator#
After launching Autoware, run the steer_offset_estimator by the following command and then perform autonomous driving. Note: You can collect data with manual driving if it is possible to use the same vehicle interface as during autonomous driving (e.g. using a joystick).
ros2 launch steer_offset_estimator steer_offset_estimator.launch.xml
Or if you want to use rosbag files, run the following commands.
ros2 param set /use_sim_time true
ros2 bag play <rosbag_file> --clock
Parameters#
| Name | Type | Description | Default | Range |
|---|---|---|---|---|
| initial_covariance | float | steer offset is larger than tolerance | 1000 | N/A |
| steer_update_hz | float | update hz of steer data | 10 | ≥0.0 |
| forgetting_factor | float | weight of using previous value | 0.999 | ≥0.0 |
| valid_min_velocity | float | velocity below this value is not used | 5 | ≥0.0 |
| valid_max_steer | float | steer above this value is not used | 0.05 | N/A |
| warn_steer_offset_deg | float | Warn if offset is above this value. ex. if absolute estimated offset is larger than 2.5[deg] => warning | 2.5 | N/A |
Diagnostics#
The steer_offset_estimator publishes diagnostics message depending on the calibration status.
Diagnostic type WARN indicates that the current steer_offset is estimated to be inaccurate. In this situation, it is strongly recommended to perform a re-calibration of the steer_offset.
| Status | Diagnostics Type | Diagnostics message |
|---|---|---|
| No calibration required | OK |
"Preparation" |
| Calibration Required | WARN |
"Steer offset is larger than tolerance" |
This diagnostics status can be also checked on the following ROS topic.
ros2 topic echo /vehicle/status/steering_offset