roi_pointcloud_fusion
Purpose
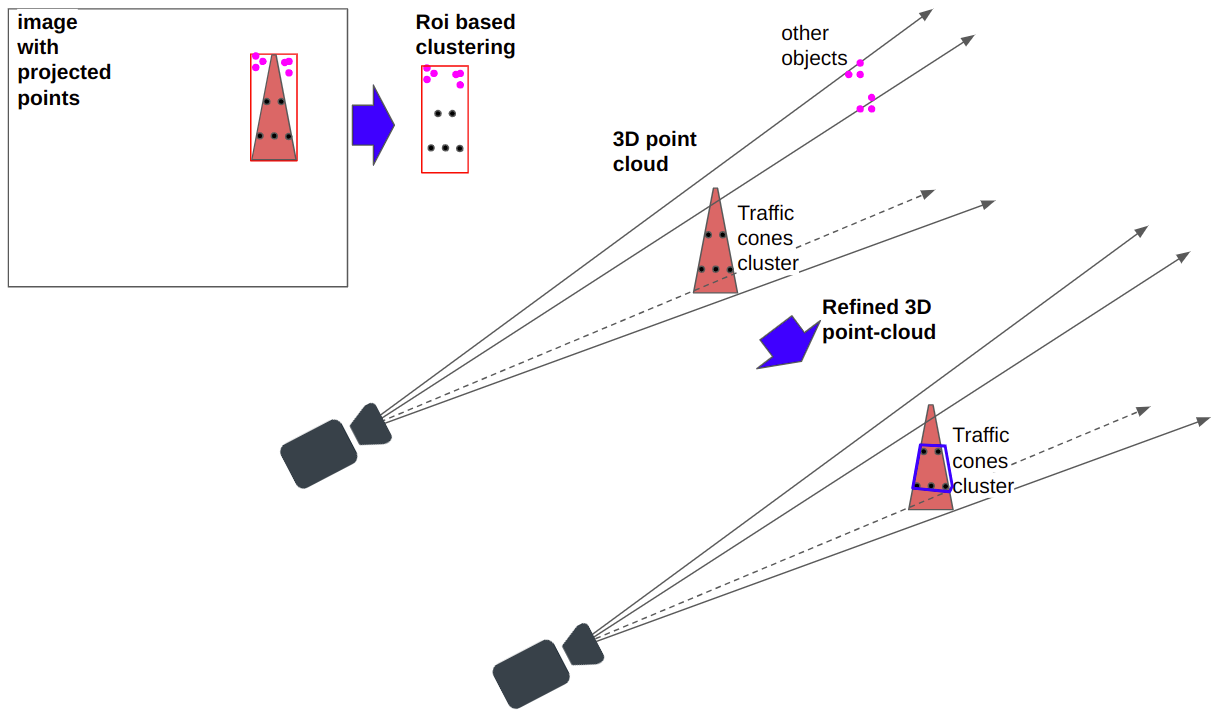
The node roi_pointcloud_fusion is to cluster the pointcloud based on Region Of Interests (ROIs) detected by a 2D object detector, specific for unknown labeled ROI.
Inner-workings / Algorithms
- The pointclouds are projected onto image planes and extracted as cluster if they are inside the unknown labeled ROIs.
- Since the cluster might contain unrelated points from background, then a refinement step is added to filter the background pointcloud by distance to camera.
| Name |
Type |
Description |
input |
sensor_msgs::msg::PointCloud2 |
input pointcloud |
input/camera_info[0-7] |
sensor_msgs::msg::CameraInfo |
camera information to project 3d points onto image planes |
input/rois[0-7] |
tier4_perception_msgs::msg::DetectedObjectsWithFeature |
ROIs from each image |
input/image_raw[0-7] |
sensor_msgs::msg::Image |
images for visualization |
Output
| Name |
Type |
Description |
output |
sensor_msgs::msg::PointCloud2 |
output pointcloud as default of interface |
output_clusters |
tier4_perception_msgs::msg::DetectedObjectsWithFeature |
output clusters |
debug/clusters |
sensor_msgs/msg/PointCloud2 |
colored cluster pointcloud for visualization |
Parameters
Core Parameters
| Name |
Type |
Description |
min_cluster_size |
int |
the minimum number of points that a cluster needs to contain in order to be considered valid |
max_cluster_size |
int |
the maximum number of points that a cluster needs to contain in order to be considered valid |
cluster_2d_tolerance |
double |
cluster tolerance measured in radial direction |
rois_number |
int |
the number of input rois |
Assumptions / Known limits
- Currently, the refinement is only based on distance to camera, the roi based clustering is supposed to work well with small object ROIs. Others criteria for refinement might needed in the future.
(Optional) Error detection and handling
(Optional) References/External links
(Optional) Future extensions / Unimplemented parts