segmentation_pointcloud_fusion
Purpose
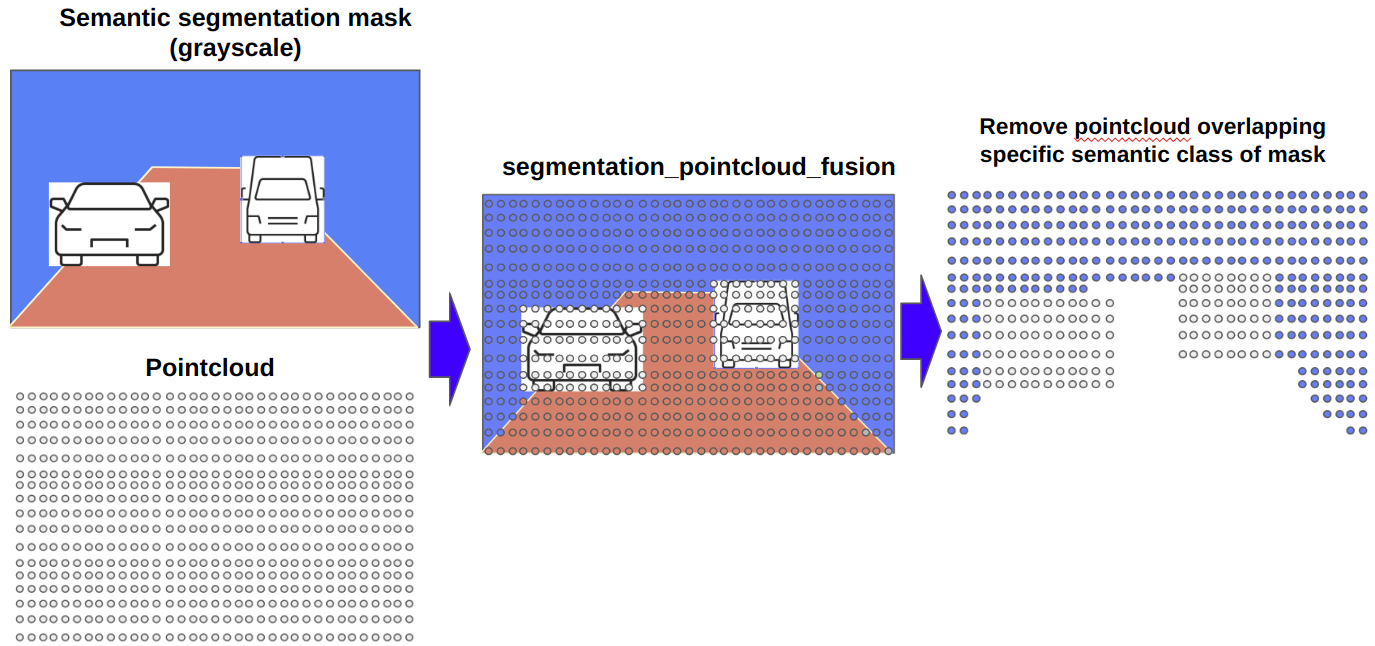
The node segmentation_pointcloud_fusion is a package for filtering pointcloud that are belong to less interesting region which is defined by semantic or instance segmentation by 2D image segmentation model.
Inner-workings / Algorithms
- The pointclouds are projected onto the semantic/instance segmentation mask image which is the output from 2D segmentation neural network.
- The pointclouds are belong to segment such as road, sidewalk, building, vegetation, sky ... are considered as less important points for autonomous driving and could be removed.
| Name |
Type |
Description |
input |
sensor_msgs::msg::PointCloud2 |
input pointcloud |
input/camera_info[0-7] |
sensor_msgs::msg::CameraInfo |
camera information to project 3d points onto image planes |
input/rois[0-7] |
sensor_msgs::msg::Image |
A gray-scale image of semantic segmentation mask, the pixel value is semantic class id |
input/image_raw[0-7] |
sensor_msgs::msg::Image |
images for visualization |
Output
| Name |
Type |
Description |
output |
sensor_msgs::msg::PointCloud2 |
output filtered pointcloud |
Parameters
Core Parameters
| Name |
Type |
Description |
rois_number |
int |
the number of input rois |
Assumptions / Known limits
(Optional) Error detection and handling
(Optional) References/External links
(Optional) Future extensions / Unimplemented parts