multi_object_tracker#
Purpose#
The results of the detection are processed by a time series. The main purpose is to give ID and estimate velocity.
Inner-workings / Algorithms#
This multi object tracker consists of data association and EKF.
![]()
Data association#
The data association performs maximum score matching, called min cost max flow problem. In this package, mussp[1] is used as solver. In addition, when associating observations to tracers, data association have gates such as the area of the object from the BEV, Mahalanobis distance, and maximum distance, depending on the class label.
EKF Tracker#
Models for pedestrians, bicycles (motorcycles), cars and unknown are available. The pedestrian or bicycle tracker is running at the same time as the respective EKF model in order to enable the transition between pedestrian and bicycle tracking. For big vehicles such as trucks and buses, we have separate models for passenger cars and large vehicles because they are difficult to distinguish from passenger cars and are not stable. Therefore, separate models are prepared for passenger cars and big vehicles, and these models are run at the same time as the respective EKF models to ensure stability.
Inputs / Outputs#
Input#
| Name | Type | Description |
|---|---|---|
~/input |
autoware_auto_perception_msgs::msg::DetectedObjects |
obstacles |
Output#
| Name | Type | Description |
|---|---|---|
~/output |
autoware_auto_perception_msgs::msg::TrackedObjects |
modified obstacles |
Parameters#
Core Parameters#
Node parameters are defined in multi_object_tracker.param.yaml and association parameters are defined in data_association.param.yaml.
Node parameters#
| Name | Type | Description |
|---|---|---|
***_tracker |
string | EKF tracker name for each class |
world_frame_id |
double | object kinematics definition frame |
enable_delay_compensation |
bool | if True, tracker use timers to schedule publishers and use prediction step to extrapolate object state at desired timestamp |
publish_rate |
double | Timer frequency to output with delay compensation |
Association parameters#
| Name | Type | Description |
|---|---|---|
can_assign_matrix |
double | Assignment table for data association |
max_dist_matrix |
double | Maximum distance table for data association |
max_area_matrix |
double | Maximum area table for data association |
min_area_matrix |
double | Minimum area table for data association |
max_rad_matrix |
double | Maximum angle table for data association |
Assumptions / Known limits#
See the model explanations.
(Optional) Error detection and handling#
(Optional) Performance characterization#
Evaluation of muSSP#
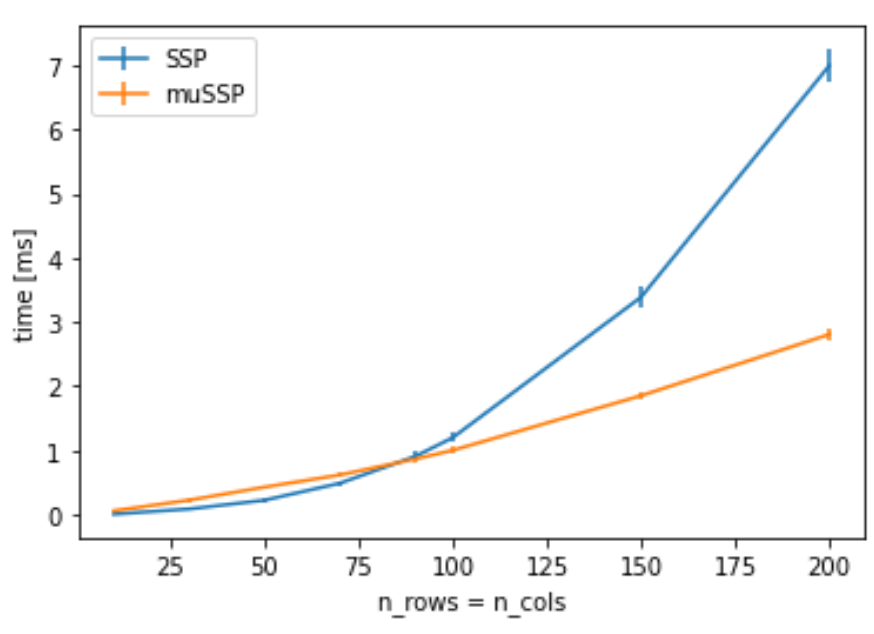
According to our evaluation, muSSP is faster than normal SSP when the matrix size is more than 100.
Execution time for varying matrix size at 95% sparsity. In real data, the sparsity was often around 95%.
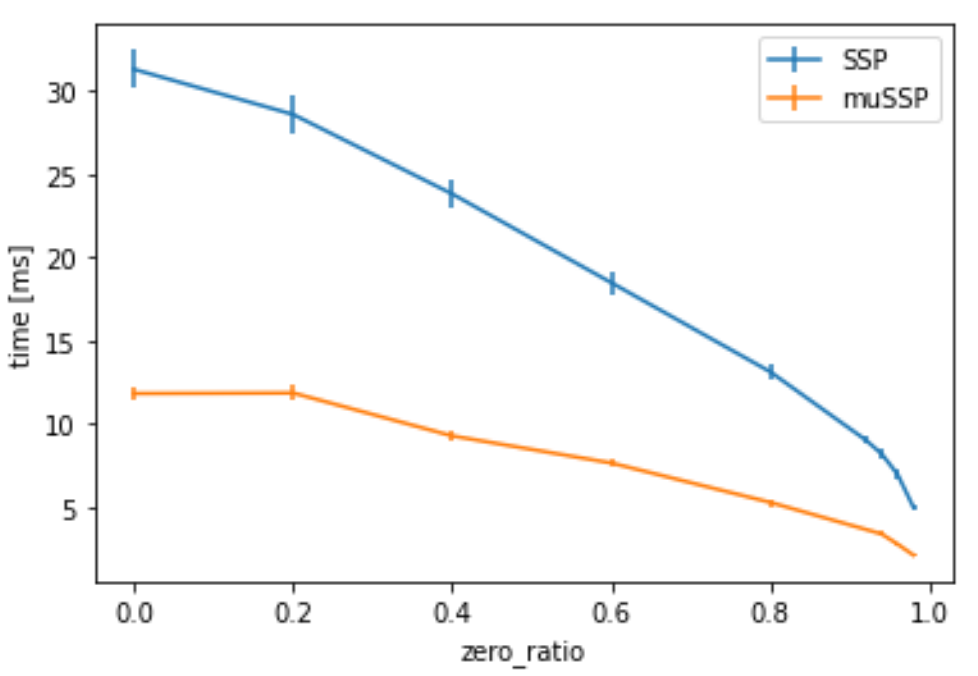
Execution time for varying the sparsity with matrix size 100.
(Optional) References/External links#
This package makes use of external code.
| Name | License | Original Repository |
|---|---|---|
| muSSP | Apache-2.0 | https://github.com/yu-lab-vt/muSSP |
[1] C. Wang, Y. Wang, Y. Wang, C.-t. Wu, and G. Yu, “muSSP: Efficient Min-cost Flow Algorithm for Multi-object Tracking,” NeurIPS, 2019