elevation_map_loader#
Purpose#
This package provides elevation map for compare_map_segmentation.
Inner-workings / Algorithms#
Generate elevation_map from subscribed pointcloud_map and vector_map and publish it. Save the generated elevation_map locally and load it from next time.
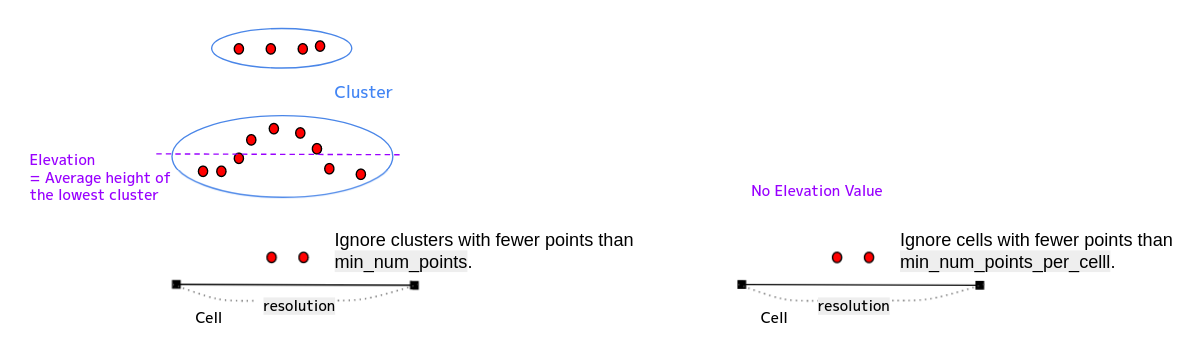
The elevation value of each cell is the average value of z of the points of the lowest cluster.
Cells with No elevation value can be inpainted using the values of neighboring cells.
Inputs / Outputs#
Input#
| Name | Type | Description |
|---|---|---|
input/pointcloud_map |
sensor_msgs::msg::PointCloud2 |
The point cloud map |
input/vector_map |
autoware_auto_mapping_msgs::msg::HADMapBin |
(Optional) The binary data of lanelet2 map |
input/pointcloud_map_metadata |
autoware_map_msgs::msg::PointCloudMapMetaData |
(Optional) The metadata of point cloud map |
Output#
| Name | Type | Description |
|---|---|---|
output/elevation_map |
grid_map_msgs::msg::GridMap |
The elevation map |
output/elevation_map_cloud |
sensor_msgs::msg::PointCloud2 |
(Optional) The point cloud generated from the value of elevation map |
Service#
| Name | Type | Description |
|---|---|---|
service/get_selected_pcd_map |
autoware_map_msgs::srv::GetSelectedPointCloudMap |
(Optional) service to request point cloud map. If pointcloud_map_loader uses selected pointcloud map loading via ROS 2 service, use this. |
Parameters#
Node parameters#
| Name | Type | Description | Default value |
|---|---|---|---|
| map_layer_name | std::string | elevation_map layer name | elevation |
| param_file_path | std::string | GridMap parameters config | path_default |
| elevation_map_directory | std::string | elevation_map file (bag2) | path_default |
| map_frame | std::string | map_frame when loading elevation_map file | map |
| use_inpaint | bool | Whether to inpaint empty cells | true |
| inpaint_radius | float | Radius of a circular neighborhood of each point inpainted that is considered by the algorithm [m] | 0.3 |
| use_elevation_map_cloud_publisher | bool | Whether to publish output/elevation_map_cloud |
false |
| use_lane_filter | bool | Whether to filter elevation_map with vector_map | false |
| lane_margin | float | Margin distance from the lane polygon of the area to be included in the inpainting mask [m]. Used only when use_lane_filter=True. | 0.0 |
| use_sequential_load | bool | Whether to get point cloud map by service | false |
| sequential_map_load_num | int | The number of point cloud maps to load at once (only used when use_sequential_load is set true). This should not be larger than number of all point cloud map cells. | 1 |
GridMap parameters#
The parameters are described on config/elevation_map_parameters.yaml.
General parameters#
| Name | Type | Description | Default value |
|---|---|---|---|
| pcl_grid_map_extraction/num_processing_threads | int | Number of threads for processing grid map cells. Filtering of the raw input point cloud is not parallelized. | 12 |
Grid map parameters#
See: https://github.com/ANYbotics/grid_map/tree/ros2/grid_map_pcl
Resulting grid map parameters.
| Name | Type | Description | Default value |
|---|---|---|---|
| pcl_grid_map_extraction/grid_map/min_num_points_per_cell | int | Minimum number of points in the point cloud that have to fall within any of the grid map cells. Otherwise the cell elevation will be set to NaN. | 3 |
| pcl_grid_map_extraction/grid_map/resolution | float | Resolution of the grid map. Width and length are computed automatically. | 0.3 |
| pcl_grid_map_extraction/grid_map/height_type | int | The parameter that determine the elevation of a cell 0: Smallest value among the average values of each cluster, 1: Mean value of the cluster with the most points |
1 |
| pcl_grid_map_extraction/grid_map/height_thresh | float | Height range from the smallest cluster (Only for height_type 1) | 1.0 |
Point Cloud Pre-processing Parameters#
Rigid body transform parameters#
Rigid body transform that is applied to the point cloud before computing elevation.
| Name | Type | Description | Default value |
|---|---|---|---|
| pcl_grid_map_extraction/cloud_transform/translation | float | Translation (xyz) that is applied to the input point cloud before computing elevation. | 0.0 |
| pcl_grid_map_extraction/cloud_transform/rotation | float | Rotation (intrinsic rotation, convention X-Y'-Z'') that is applied to the input point cloud before computing elevation. | 0.0 |
Cluster extraction parameters#
Cluster extraction is based on pcl algorithms. See https://pointclouds.org/documentation/tutorials/cluster_extraction.html for more details.
| Name | Type | Description | Default value |
|---|---|---|---|
| pcl_grid_map_extraction/cluster_extraction/cluster_tolerance | float | Distance between points below which they will still be considered part of one cluster. | 0.2 |
| pcl_grid_map_extraction/cluster_extraction/min_num_points | int | Min number of points that a cluster needs to have (otherwise it will be discarded). | 3 |
| pcl_grid_map_extraction/cluster_extraction/max_num_points | int | Max number of points that a cluster can have (otherwise it will be discarded). | 1000000 |
Outlier removal parameters#
See https://pointclouds.org/documentation/tutorials/statistical_outlier.html for more explanation on outlier removal.
| Name | Type | Description | Default value |
|---|---|---|---|
| pcl_grid_map_extraction/outlier_removal/is_remove_outliers | float | Whether to perform statistical outlier removal. | false |
| pcl_grid_map_extraction/outlier_removal/mean_K | float | Number of neighbors to analyze for estimating statistics of a point. | 10 |
| pcl_grid_map_extraction/outlier_removal/stddev_threshold | float | Number of standard deviations under which points are considered to be inliers. | 1.0 |
Subsampling parameters#
See https://pointclouds.org/documentation/tutorials/voxel_grid.html for more explanation on point cloud downsampling.
| Name | Type | Description | Default value |
|---|---|---|---|
| pcl_grid_map_extraction/downsampling/is_downsample_cloud | bool | Whether to perform downsampling or not. | false |
| pcl_grid_map_extraction/downsampling/voxel_size | float | Voxel sizes (xyz) in meters. | 0.02 |