Predicted Path Checker#
Purpose#
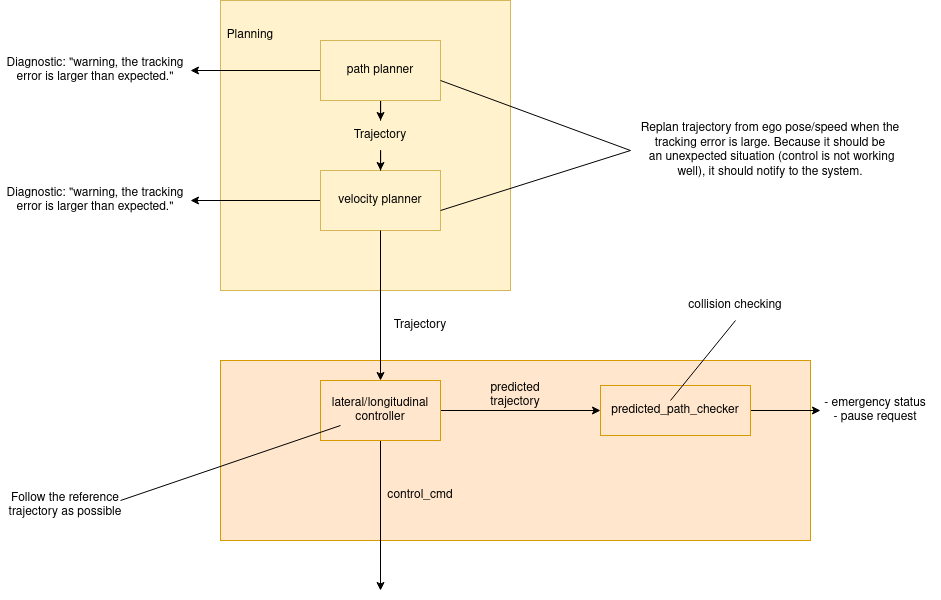
The Predicted Path Checker package is designed for autonomous vehicles to check the predicted path generated by control modules. It handles potential collisions that the planning module might not be able to handle and that in the brake distance. In case of collision in brake distance, the package will send a diagnostic message labeled "ERROR" to alert the system to send emergency and in the case of collisions in outside reference trajectory, it sends pause request to pause interface to make the vehicle stop.
Algorithm#
The package algorithm evaluates the predicted trajectory against the reference trajectory and the predicted objects in the environment. It checks for potential collisions and, if necessary, generates an appropriate response to avoid them ( emergency or pause request).
Inner Algorithm#
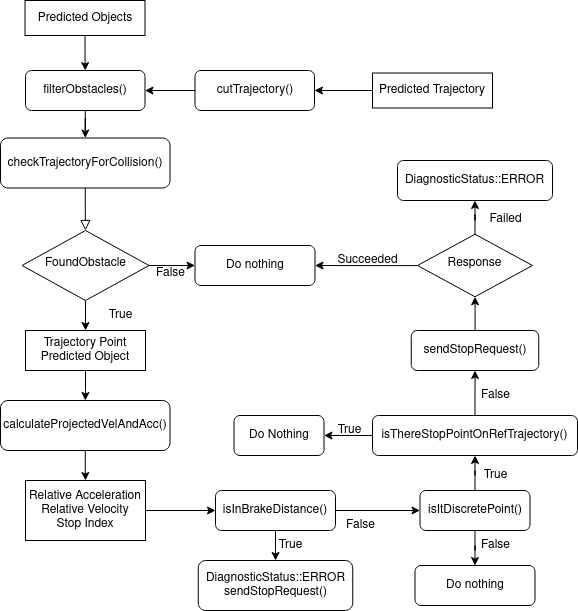
cutTrajectory() -> It cuts the predicted trajectory with input length. Length is calculated by multiplying the velocity of ego vehicle with "trajectory_check_time" parameter and "min_trajectory_length".
filterObstacles() -> It filters the predicted objects in the environment. It filters the objects which are not in front of the vehicle and far away from predicted trajectory.
checkTrajectoryForCollision() -> It checks the predicted trajectory for collision with the predicted objects. It calculates both polygon of trajectory points and predicted objects and checks intersection of both polygons. If there is an intersection, it calculates the nearest collision point. It returns the nearest collision point of polygon and the predicted object. It also checks predicted objects history which are intersect with the footprint before to avoid unexpected behaviors. Predicted objects history stores the objects if it was detected below the "chattering_threshold" seconds ago.
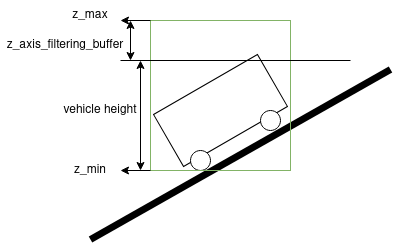
If the "enable_z_axis_obstacle_filtering" parameter is set to true, it filters the predicted objects in the Z-axis by using "z_axis_filtering_buffer". If the object does not intersect with the Z-axis, it is filtered out.
calculateProjectedVelAndAcc() -> It calculates the projected velocity and acceleration of the predicted object on predicted trajectory's collision point's axes.
isInBrakeDistance() -> It checks if the stop point is in brake distance. It gets relative velocity and acceleration of ego vehicle with respect to the predicted object. It calculates the brake distance, if the point in brake distance, it returns true.
isItDiscretePoint() -> It checks if the stop point on predicted trajectory is discrete point or not. If it is not discrete point, planning should handle the stop.
isThereStopPointOnRefTrajectory() -> It checks if there is a stop point on reference trajectory. If there is a stop point before the stop index, it returns true. Otherwise, it returns false, and node is going to call pause interface to make the vehicle stop.
Inputs#
| Name | Type | Description |
|---|---|---|
~/input/reference_trajectory |
autoware_auto_planning_msgs::msg::Trajectory |
Reference trajectory |
~/input/predicted_trajectory |
autoware_auto_planning_msgs::msg::Trajectory |
Predicted trajectory |
~/input/objects |
autoware_auto_perception_msgs::msg::PredictedObject |
Dynamic objects in the environment |
~/input/odometry |
nav_msgs::msg::Odometry |
Odometry message of vehicle to get current velocity |
~/input/current_accel |
geometry_msgs::msg::AccelWithCovarianceStamped |
Current acceleration |
/control/vehicle_cmd_gate/is_paused |
tier4_control_msgs::msg::IsPaused |
Current pause state of the vehicle |
Outputs#
| Name | Type | Description |
|---|---|---|
~/debug/marker |
visualization_msgs::msg::MarkerArray |
Marker for visualization |
~/debug/virtual_wall |
visualization_msgs::msg::MarkerArray |
Virtual wall marker for visualization |
/control/vehicle_cmd_gate/set_pause |
tier4_control_msgs::srv::SetPause |
Pause service to make the vehicle stop |
/diagnostics |
diagnostic_msgs::msg::DiagnosticStatus |
Diagnostic status of vehicle |
Parameters#
Node Parameters#
| Name | Type | Description | Default value |
|---|---|---|---|
update_rate |
double |
The update rate [Hz] | 10.0 |
delay_time |
double |
he time delay considered for the emergency response [s] | 0.17 |
max_deceleration |
double |
Max deceleration for ego vehicle to stop [m/s^2] | 1.5 |
resample_interval |
double |
Interval for resampling trajectory [m] | 0.5 |
stop_margin |
double |
The stopping margin [m] | 0.5 |
ego_nearest_dist_threshold |
double |
The nearest distance threshold for ego vehicle [m] | 3.0 |
ego_nearest_yaw_threshold |
double |
The nearest yaw threshold for ego vehicle [rad] | 1.046 |
min_trajectory_check_length |
double |
The minimum trajectory check length in meters [m] | 1.5 |
trajectory_check_time |
double |
The trajectory check time in seconds. [s] | 3.0 |
distinct_point_distance_threshold |
double |
The distinct point distance threshold [m] | 0.3 |
distinct_point_yaw_threshold |
double |
The distinct point yaw threshold [deg] | 5.0 |
filtering_distance_threshold |
double |
It ignores the objects if distance is higher than this [m] | 1.5 |
use_object_prediction |
bool |
If true, node predicts current pose of the objects wrt delta time [-] | true |
Collision Checker Parameters#
| Name | Type | Description | Default value |
|---|---|---|---|
width_margin |
double |
The width margin for collision checking [Hz] | 0.2 |
chattering_threshold |
double |
The chattering threshold for collision detection [s] | 0.2 |
z_axis_filtering_buffer |
double |
The Z-axis filtering buffer [m] | 0.3 |
enable_z_axis_obstacle_filtering |
bool |
A boolean flag indicating if Z-axis obstacle filtering is enabled | false |