Limitations#
The document describes the limitations that are currently present in the behavior_path_planner module.
The following items (but not limited to) fall in the scope of limitation:
- limitations due to the third-party API design and requirement
- limitations due to any shortcoming out of the developer's control.
Limitation: Multiple connected opposite lanes require Linestring with shared ID#
To fully utilize the Lanelet2's API, the design of the vector map (.osm) needs to follow all the criteria described in Lanelet2 documentation. Specifically, in the case of 2 or more lanes, the Linestrings that divide the current lane with the opposite/adjacent lane need to have a matching Linestring ID. Assume the following ideal case.
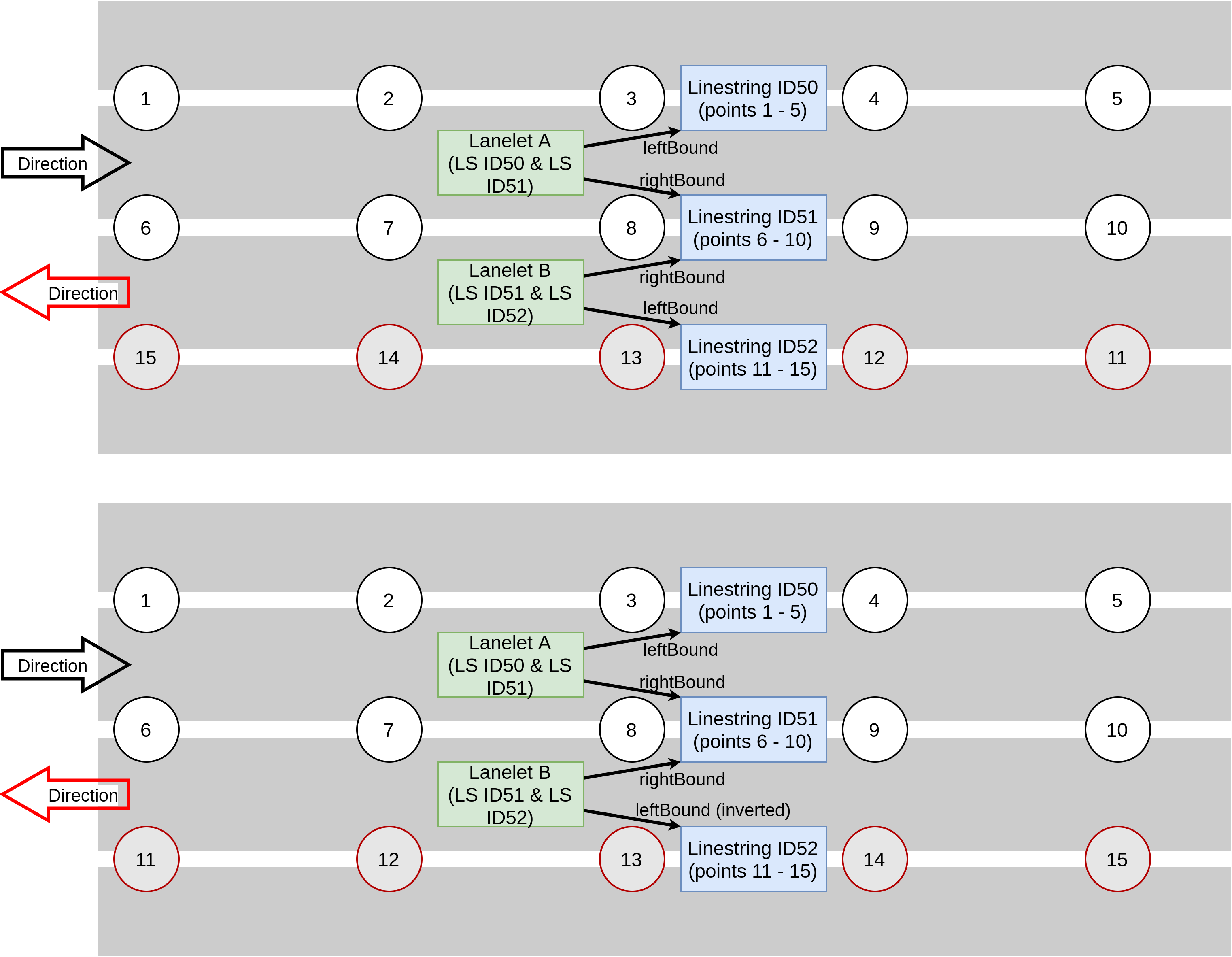
In the image, Linestring ID51 is shared by Lanelet A and Lanelet B. Hence we can directly use the available left, adjacentLeft, right, adjacentRight and findUsages method within Lanelet2's API to directly query the direction and opposite lane availability.
const auto right_lane = routing_graph_ptr_->right(lanelet);
const auto adjacent_right_lane = routing_graph_ptr_->adjacentRight(lanelet);
const auto opposite_right_lane = lanelet_map_ptr_->laneletLayer.findUsages(lanelet.rightBound().invert());
The following images show the situation where these API does not work directly. This means that we cannot use them straight away, and several assumptions and logical instruction are needed to make these APIs work.
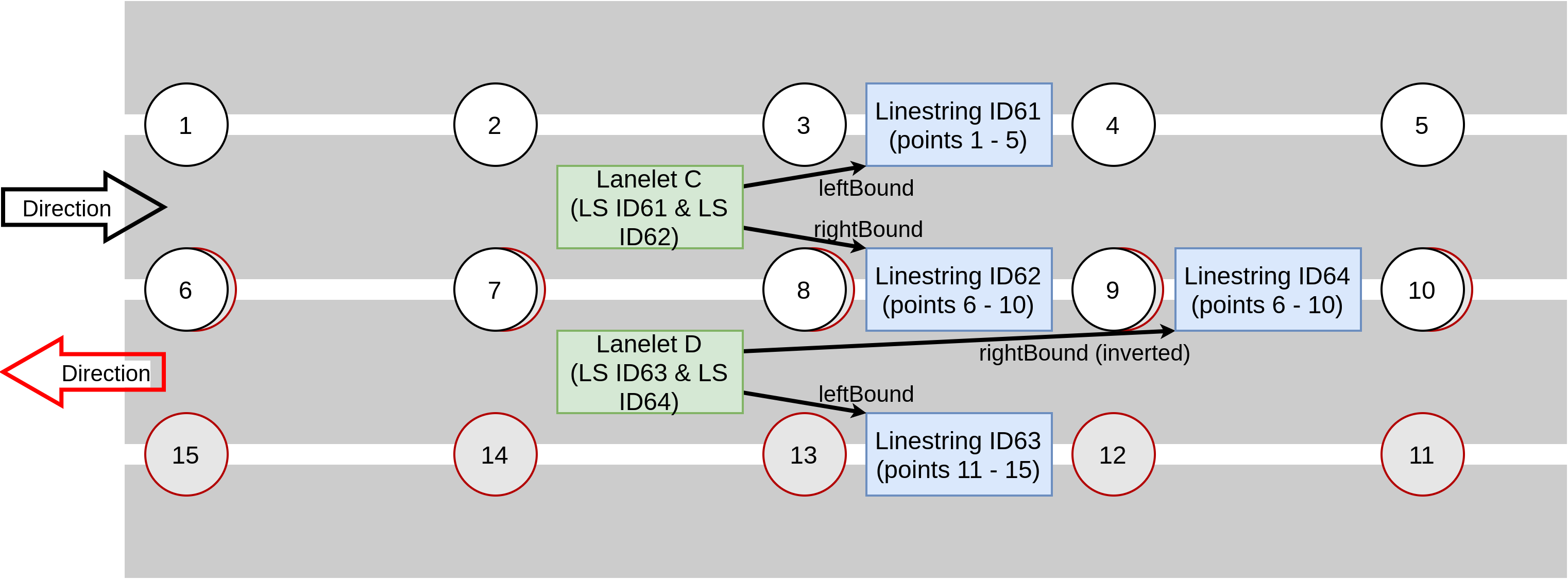
In this example (multiple linestring issues), Lanelet C contains Linestring ID61 and ID62, while Lanelet D contains Linestring ID63 and ID 64. Although the Linestring ID62 and ID64 have identical point IDs and seem visually connected, the API will treat these Linestring as though they are separated. When it searches for any Lanelet that is connected via Linestring ID62, it will return NULL, since ID62 only connects to Lanelet C and not other Lanelet.
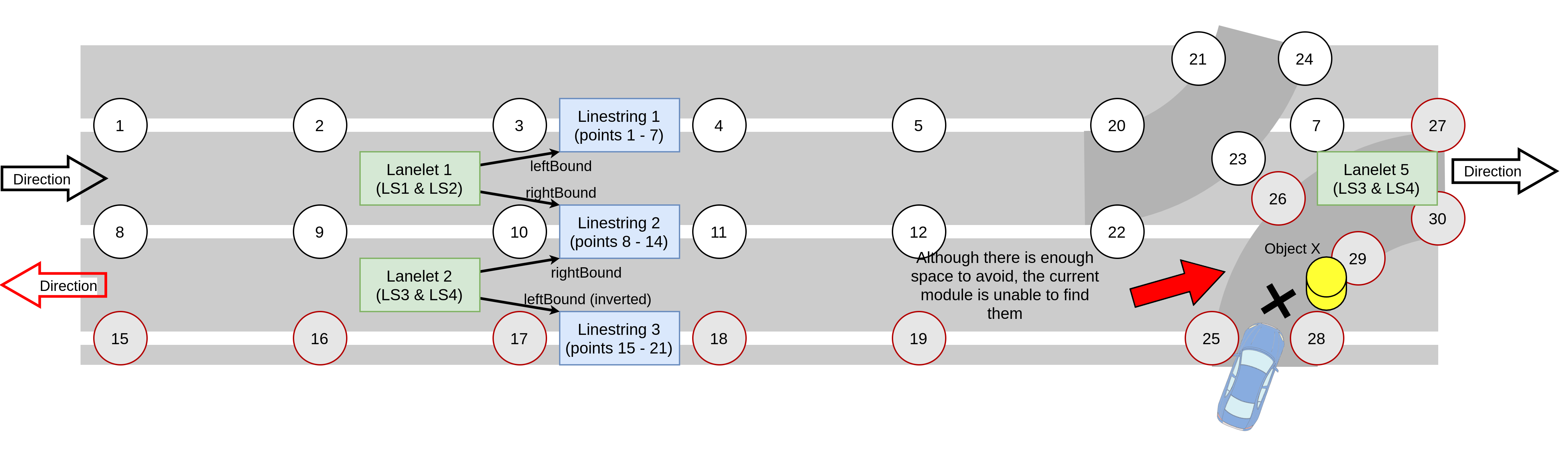
Although, in this case, it is possible to forcefully search the lanelet availability by checking the lanelet that contains the points, usinggetLaneletFromPoint method. But, the implementation requires complex rules for it to work. Take the following images as an example.
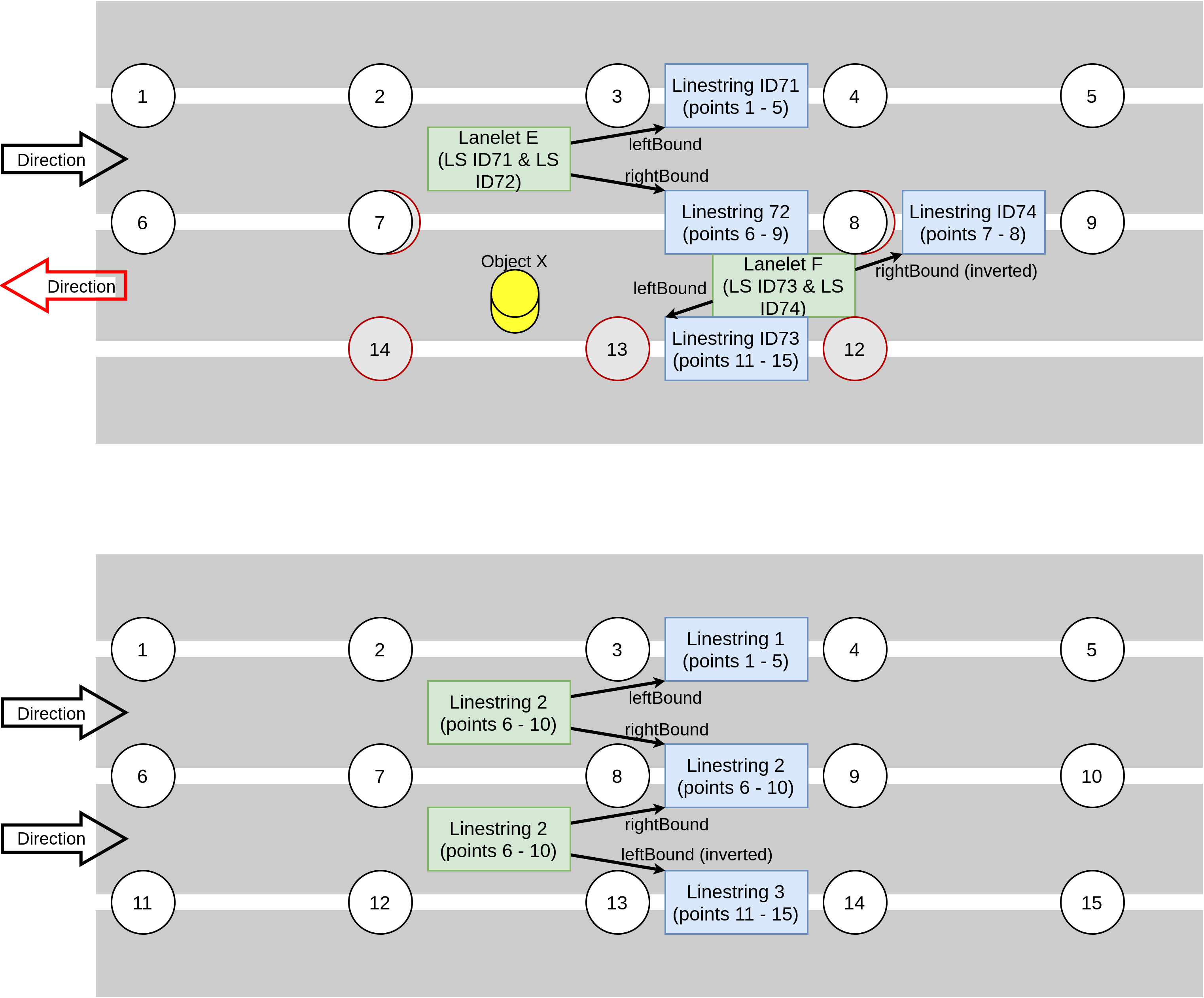
Assume Object X is in Lanelet F. We can forcefully search Lanelet E via Point 7, and it will work if Point 7 is utilized by only 2 lanelet. However, the complexity increases when we want to start searching for the direction of the opposite lane. We can infer the direction of the lanelet by using mathematical operations (dot product of vector V_ID72 (Point 6 minus Point 9), and V_ID74 (Point 7 minus Point 8). But, notice that we did not use Point 7 in V_ID72. This is because searching it requires an iteration, adding additional non-beneficial computation.
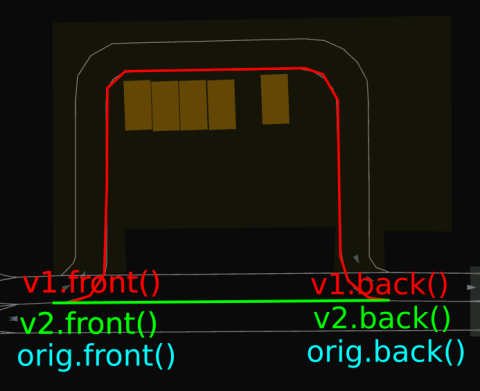
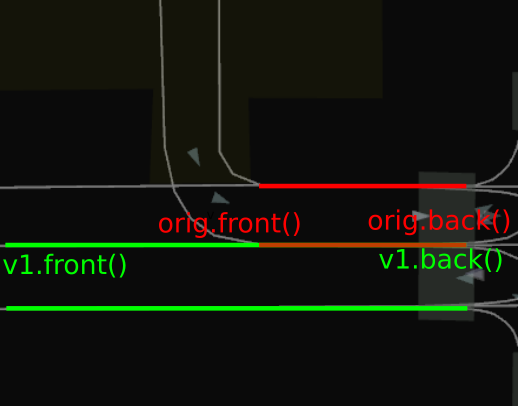
Suppose the points are used by more than 2 lanelets. In that case, we have to find the differences for all lanelet, and the result might be undefined. The reason is that the differences between the coordinates do not reflect the actual shape of the lanelet. The following image demonstrates this point.
There are many other available solutions to try. However, further attempt to solve this might cause issues in the future, especially for maintaining or scaling up the software.
In conclusion, the multiple Linestring issues will not be supported. Covering these scenarios might give the user an "everything is possible" impression. This is dangerous since any attempt to create a non-standardized vector map is not compliant with safety regulations.
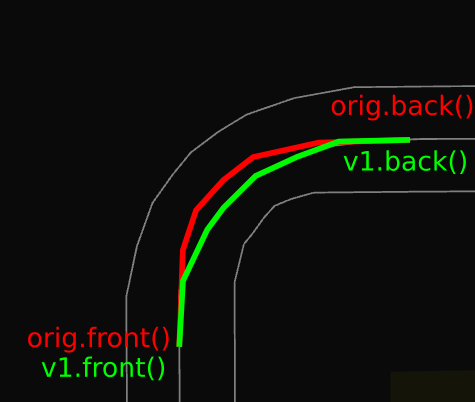
Limitation: Avoidance at Corners and Intersections#
Currently, the implementation doesn't cover avoidance at corners and intersections. The reason is similar to here. However, this case can still be supported in the future (assuming the vector map is defined correctly).
Limitation: Chattering shifts#
There are possibilities that the shifted path chatters as a result of various factors. For example, bounded box shape or position from the perception input. Sometimes, it is difficult for the perception to get complete information about the object's size. As the object size is updated, the object length will also be updated. This might cause shifts point to be re-calculated, therefore resulting in chattering shift points.
